GEONE - GEOSCLASSIC - categorical variable
Estimation (kriging) and simulation (Sequential Indicator Simulation, SIS)
The following functions are used for a grid, i.e. the evaluation are done at the centers of the grid cells:
geone.geosclassicinterface.estimateIndicator: for estimation, kriging of the indicator of each category, producing probabilities of for the categoriesgeone.geosclassicinterface.simulate: for simulation (sequential Indicator simulation, SIS)
Note: these functions detect the space dimension (1, 2, or 3) based on the parameter ``dimension`` that gives the number of cells along each axis.
These functions launch a C program running in parallel (based on OpenMP) for the simulation / estimation in a grid, assuming conditioning data located at the center of the grid cells. The conditioning data are treated as follows: (one of) the most frequent categories of the data point(s) falling in the same grid cell is attributed to that cell.
Interpolation type (kriging type)
Estimation and simulation are done based on the kriging of the indicator of each category (consisered as a continuous variable for the presence of the category); simple kriging or ordinary kriging can be used according to the parameter method:
method='simple_kriging': simple krigingmethod='oridinary_kriging': ordinary kriging (default)
Kriging systems are based on a covariance model: required parameter cov_model. A single covariance model can be used for all the categories or a covariance model per category can be specified. See the notebook ex_general_multiGaussian.ipynb for available covariance models and examples.
Note: non-stationarities may be handled: local rotation, local multiplier for sill and/or range(s), see the notebook ``ex_geosclassic_indicator_1d_2_non_stat_cov.ipynb``.
Simple kriging allows to specify the probabilities of the presence of the categories (kriging mean values of the indicator variable), stationary (global) or non-stationary (local). By default the probabilities are set to the proportions of the data values (stationary) or uniform probabilities if no data point is present.
Ordinary kriging accounts for the proportion (mean value) at the vinicity of the estimated / simulated point. Note that one can also specify probabilities, which is used when no informed points is present in the search neighborhood of the estimated / simulated point.
Conditioning data
Data consists of an ensemble of points, where each data point is given by a location (in the grid), a category value:
x: data locationsv: data category values
The conditioning data are treated as follows: (one of) the most frequent categories of the data point(s) falling in the same grid cell is attributed to that cell.
Search neighborhood
See notebook ex_geosclassic_1d_1.ipynb for details.
Computational resources - multiprocessing
The external C function (Geos-Classic library) is launched in parallel (based on OpenMP), using a given number of threads. Moreover, for simulation, multiple parallel processes can be considered (several parallel calls of the function).
The parameter to specify the computational resources for the estimation (interpolation), function geone.geosclassicinterface.estimateIndicator:
nthreads: number of threads for the interpolation in the grid (C function, 1 process)
and the parameters for the simulation, function geone.geosclassicinterface.simulateIndicator:
nproc: number of parallel process(es) for the simulations in the grid (C function)nthreads_per_proc: number of threads used per process (C function)
Note that for the simulation, this represents, in terms of computational resources, a total of nproc * nthreads_per_proc CPUs (for the part with the C function); this number should not exceed the the total number of CPUs of the system (retrieved by multiprocessing.cpu_count() or os.cpu_count()).
Computational resources - Important remark
Although some default values are proposed, it is strongly recommended to specify the above parameters controlling the computational resources; a few tests on the machine used allows to select a good set-up.
Ouput - getting the results
The functions geone.geosclassicinterface.estimate and geone.geosclassicinterface.simulate returns a dictionary
geosclassic_output = {'image':image, 'nwarning':nwarning, 'warnings':warnings}
with
geosclassic_output['image']: a geone image (instance of the classgeone.img.Img) withfor
geone.geosclassicinterface.estimateIndicator:ncategoryvariables, wherencategoryis the number of categories, the i-th variable (index i) is the estimated proportion for the i-th category (kriging mean value of the indicator variable of the i-th category)for
geone.geosclassicinterface.simulate:nrealvariables, wherenrealis the number of realizations done, the i-th variable (index i) being the i-th realization
geosclassic_output['nwarning']: anint, the total number of warning(s) encountered during the rungeosclassic_output['warnings']: a list of strings (possibly empty), the list of all distinct warning messages
Examples in 1D
In this notebook, examples in 1D are given.
Import what is required
[1]:
import numpy as np
import matplotlib.pyplot as plt
import time
# import package 'geone'
import geone as gn
[2]:
# Show version of python and version of geone
import sys
print(sys.version_info)
print('geone version: ' + gn.__version__)
sys.version_info(major=3, minor=13, micro=7, releaselevel='final', serial=0)
geone version: 1.3.1
Remark
The matplotlib figures can be visualized in interactive mode:
%matplotlib notebook: enable interactive mode%matplotlib inline: disable interactive mode
Category values
A list of category values (facies) must be defined. Let ncategory be the length of this list, i.e. the number of categories:
if
ncategory == 1: the unique category value given must not be equal to 0; this is used for a binary case with values (“unique category value”, 0), where 0 indicates the absence of the considered medium; conditioning data values should be “unique category value” or 0if
ncategory >= 2: this is used for a multi-category case with given values (distinct); conditioning data values should be in the list of given values
Then, set color for each category, and color maps for proportions (for further plots).
Below: select the case with ``ncategory`` greater than one or equal to one below, comment the undesired cell.
[3]:
# Case with ncategory > 1
# -----------------------
category_values = [1., 2., 3.]
ncategory = len(category_values)
# Set colors ...
categVal = category_values
categCol = ['lightblue', 'orange', 'darkgreen'] # must be of length len(categVal)
cmap_categ = [gn.customcolors.custom_cmap(['white', c]) for c in categCol]
[4]:
# # Case with ncategory = 1
# # -----------------------
# category_values = [2.] # all categories are 2. and 0.
# ncategory = len(category_values)
# # Set colors ...
# categVal = [category_values[0], 0]
# categCol = ['tab:red', 'lightblue'] # must be of length len(categVal)
# cmap_categ = [gn.customcolors.custom_cmap(['white', c]) for c in categCol]
Grid (1D)
[5]:
nx = 1000 # number of cells
sx = 1.0 # cell unit
ox = 0.0 # origin
Covariance model(s)
A covariance model is required for each category. If only one is defined, it is used for every category (it is ‘’recycled’’).
In 1D, a covariance model is given by an instance of the class geone.covModel.covModel1D.
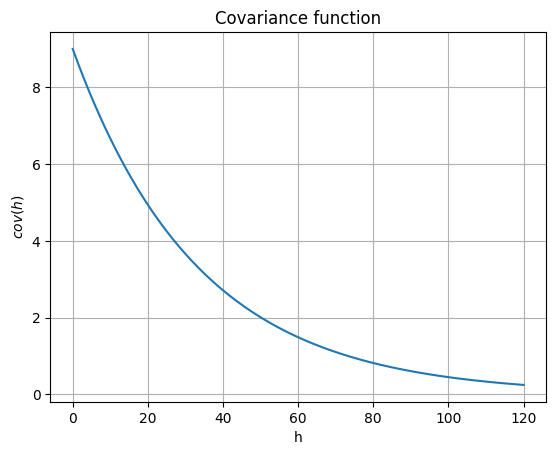
A covariance model is defined by its elementary contributions given as a list of 2-tuples, whose the first component is the type given by a string (nugget, spherical, exponential, gaussian, …) and the second component is a dictionary used to pass the required parameters (the weight (w), the range (r), …).
Note: see the notebook ``ex_general_multiGaussian.ipynb`` for available covariance models and examples.
[6]:
cov_model = gn.covModel.CovModel1D(elem=[
('exponential', {'w':9., 'r':100}), # elementary contribution
], name='model-1D example')
plt.figure()
cov_model.plot_model()
plt.title('Covariance function')
plt.show()
1. Example
Settings - using data (optional) and probability (constant, optional)
[7]:
if ncategory > 1:
# Case with ncategory > 1
# -----------------------
# Data
x = [50.5, 300.1, 550.2, 849.4] # data locations (real coordinates)
v = [ 1., 2., 1., 3.] # data values
# x = None
# v = None
# Probability, proportion of each category
probability = [.1, .2, .7] # should sum to 1
# probability = None
# Type of kriging
method = 'simple_kriging'
else:
# Case with ncategory = 1
# -----------------------
# Data
x = [50.5, 300.1, 550.2, 849.4] # data locations (real coordinates)
v = [ 0., 2., 2., 0.] # data values
# x = None
# v = None
# Probability, proportion (of non-zero category)
probability = [.7] # list of one number in the interval [0, 1]
# probability = None
# Type of kriging
method = 'simple_kriging'
Estimation of probabilities (by kriging)
[8]:
# Computational resources
nthreads = 8
t1 = time.time() # start time
geosclassic_output = gn.geosclassicinterface.estimateIndicator(
category_values, # list of categories (required)
cov_model, # covariance model(s) (required)
nx, sx, ox, # grid geometry (nx is required)
x=x, v=v, # data
probability=probability, # probability
method=method, # type of kriging
use_unique_neighborhood=True, # search neighborhood ...
# searchRadius=None,
# searchRadiusRelative=1.2,
nneighborMax=12,
nthreads=nthreads, # computational resources
verbose=2 # verbose mode
)
t2 = time.time() # end time
print('Elapsed time: {:.2g} sec'.format(t2-t1))
krig_img = geosclassic_output['image'] # output image
estimateIndicator: call `run_MPDSOMPGeosClassicIndicatorSim` [1 process of 8 thread(s) (OpenMP)] ...
estimateIndicator: `run_MPDSOMPGeosClassicIndicatorSim` [1 process] complete
Elapsed time: 0.0048 sec
[9]:
# Total number of warning(s), and warning messages
geosclassic_output['nwarning'], geosclassic_output['warnings']
[9]:
(0, [])
[10]:
# %%script false --no-raise-error # skip this cell! (comment this line to run the cell)
# Equivalent, using other computational resources
# -----------------------------------------------
# Computational resources
nthreads = 1
t1 = time.time() # start time
geosclassic_output = gn.geosclassicinterface.estimateIndicator(
category_values, # list of categories (required)
cov_model, # covariance model(s) (required)
nx, sx, ox, # grid geometry (nx is required)
x=x, v=v, # data
probability=probability, # probability
method=method, # type of kriging
use_unique_neighborhood=True, # search neighborhood ...
# searchRadius=None,
# searchRadiusRelative=1.2,
nneighborMax=12,
nthreads=nthreads, # computational resources
verbose=2 # verbose mode
)
t2 = time.time() # end time
print('Elapsed time: {:.2g} sec'.format(t2-t1))
krig_img_2 = geosclassic_output['image'] # output image
print(f"Same results ? {np.allclose(krig_img.val, krig_img_2.val)}")
estimateIndicator: call `run_MPDSOMPGeosClassicIndicatorSim` [1 process of 1 thread(s) (OpenMP)] ...
estimateIndicator: `run_MPDSOMPGeosClassicIndicatorSim` [1 process] complete
Elapsed time: 0.0068 sec
Same results ? True
Simulations
[11]:
# Number of realizations
nreal = 1000
# Seed
seed = 321
# Computational resources
nproc = 2
nthreads_per_proc = 4
t1 = time.time() # start time
geosclassic_output = gn.geosclassicinterface.simulateIndicator(
category_values, # list of categories (required)
cov_model, # covariance model(s) (required)
nx, sx, ox, # grid geometry (nx is required)
x=x, v=v, # data
probability=probability, # probability
method=method, # type of kriging
searchRadius=None, # search neighborhood ...
searchRadiusRelative=1.2,
nneighborMax=12,
nreal=nreal, # number of realizations
seed=seed, # seed
nproc=nproc, # computational resources ...
nthreads_per_proc=nthreads_per_proc,
verbose=2 # verbose mode
)
t2 = time.time() # end time
print('Elapsed time: {:.2g} sec'.format(t2-t1))
simul_img = geosclassic_output['image'] # output image
simulateIndicator: call `run_MPDSOMPGeosClassicIndicatorSim` [2 process(es) of 4 thread(s) (OpenMP)] ...
simulateIndicator: `run_MPDSOMPGeosClassicIndicatorSim` [2 process(es)] complete
Elapsed time: 2.7 sec
[12]:
# Total number of warning(s), and warning messages
geosclassic_output['nwarning'], geosclassic_output['warnings']
[12]:
(0, [])
[13]:
# %%script false --no-raise-error # skip this cell! (comment this line to run the cell)
# Equivalent, using other computational resources
# -----------------------------------------------
# Computational resources
nproc = 1
nthreads_per_proc = 1
t1 = time.time() # start time
geosclassic_output = gn.geosclassicinterface.simulateIndicator(
category_values, # list of categories (required)
cov_model, # covariance model(s) (required)
nx, sx, ox, # grid geometry (nx is required)
x=x, v=v, # data
probability=probability, # probability
method=method, # type of kriging
searchRadius=None, # search neighborhood ...
searchRadiusRelative=1.2,
nneighborMax=12,
nreal=nreal, # number of realizations
seed=seed, # seed
nproc=nproc, # computational resources ...
nthreads_per_proc=nthreads_per_proc,
verbose=2 # verbose mode
)
t2 = time.time() # end time
print('Elapsed time: {:.2g} sec'.format(t2-t1))
simul_img_2 = geosclassic_output['image'] # output image
print(f"Same results ? {np.allclose(simul_img.val, simul_img_2.val)}")
simulateIndicator: call `run_MPDSOMPGeosClassicIndicatorSim` [1 process of 1 thread(s) (OpenMP)] ...
simulateIndicator: `run_MPDSOMPGeosClassicIndicatorSim` [1 process] complete
Elapsed time: 12 sec
Same results ? True
Plot the results
[14]:
# Set sapcing (cell size) in y direction (1 cell in 1D) to visualize images using gn.imgplot.drawImage2D
sy = 0.2 * (simul_img.xmax() - simul_img.xmin())
simul_img.sy = sy
krig_img.sy = sy
if x is not None:
# Set y-coordinates for conditioning data points for visualization
y = len(x) * [simul_img.oy + 0.5*simul_img.sy]
[15]:
# Compute proportion of each category (pixel-wise)
simul_img_prop = gn.img.imageCategProp(simul_img, category_values)
[16]:
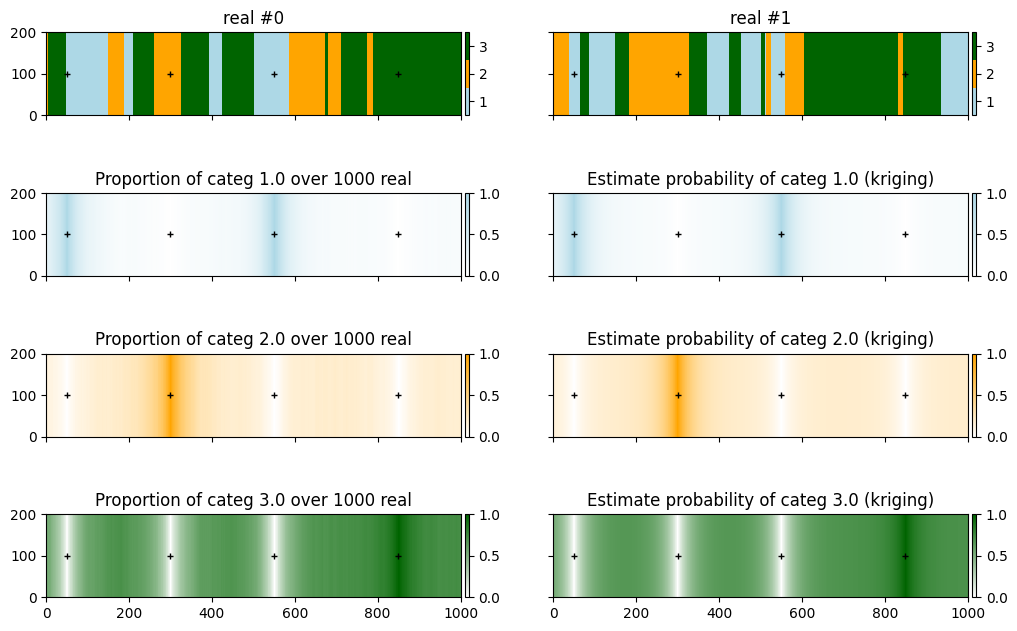
# Plot
plt.subplots(1+ncategory, 2, figsize=(12, 2*(1+ncategory)), sharex=True, sharey=True)
for i in range(2):
plt.subplot(1+ncategory, 2, i+1)
gn.imgplot.drawImage2D(simul_img, iv=i, categ=True, categVal=categVal, categCol=categCol)
if x is not None:
plt.plot(x, y, '+', c='black', markersize=5) # add conditioning point locations
plt.title(f'real #{i}')
for i in range(ncategory):
plt.subplot(1+ncategory, 2, 2*i+3)
gn.imgplot.drawImage2D(simul_img_prop, iv=i, vmin=0, vmax=1, cmap=cmap_categ[i])
if x is not None:
plt.plot(x, y, '+', c='black', markersize=5) # add conditioning point locations
plt.title(f'Proportion of categ {categVal[i]} over {nreal} real')
plt.subplot(1+ncategory, 2, 2*i+4)
gn.imgplot.drawImage2D(krig_img, iv=i, vmin=0, vmax=1, cmap=cmap_categ[i])
if x is not None:
plt.plot(x, y, '+', c='black', markersize=5) # add conditioning point locations
plt.title(f'Estimate probability of categ {categVal[i]} (kriging)')
plt.show()
Check results
[17]:
# Check data
# ----------
if x is not None:
# Get index of conditioning location in the grid
data_grid_index = [gn.img.pointToGridIndex(xk, 0, 0, sx, 1., 1., ox, 0., 0.) for xk in x] # (ix, iy, iz) for each data point
# Check estimation
krig_v = [krig_img.val[:, iz, iy, ix] for ix, iy, iz in data_grid_index]
if ncategory == 1:
print(f'Estimation: all data respected ? {np.all(np.asarray(krig_v).reshape(-1) == np.asarray([1 if vi == category_values[0] else 0 for vi in v]))}')
else:
print(f'Estimation: all data respected ? {np.all([np.all(krig_v[i] == np.eye(ncategory)[np.where(np.asarray(category_values) == v[i])[0][0]]) for i in range(len(x))])}')
# Check simulation
sim_v = [simul_img.val[:, iz, iy, ix] for ix, iy, iz in data_grid_index]
print(f'Simulation: all data respected ? {np.all([np.all(sim_v[i] == v[i]) for i in range(len(x))])}')
Estimation: all data respected ? True
Simulation: all data respected ? True
[18]:
# Compare probabilities
# ---------------------
if probability is not None:
print(f'Prescribed probabilities = {probability}')
print(f'Estimation: probabilities (mean over the grid) = {krig_img.val.mean(axis=(1,2,3))}')
print(f'Simulation: probabilities (mean over the grid and all real.)= {[np.mean(simul_img.val == cv) for cv in category_values]}')
Prescribed probabilities = [0.1, 0.2, 0.7]
Estimation: probabilities (mean over the grid) = [0.2000514 0.21483179 0.58511682]
Simulation: probabilities (mean over the grid and all real.)= [np.float64(0.189052), np.float64(0.214658), np.float64(0.59629)]
2. Example - using non-stationary probabilities
Setting probability (proportion) maps
[19]:
# Coordinates of the center of grid cells
xg = ox + sx*(0.5+np.arange(nx))
if ncategory > 1:
# Case with ncategory > 1
# -----------------------
# Define probability maps for each category
c = 0.9
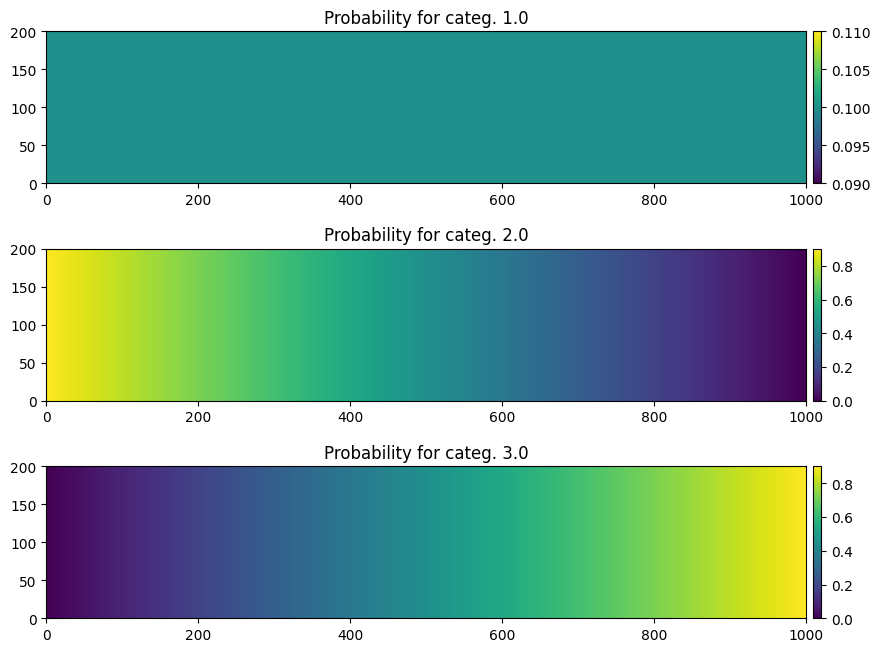
p1 = np.linspace(c, 0., nx)
p2 = c - p1
p0 = (1. - c) * np.ones_like(p1) # 1.0 - p1 - p2 # constant map (0.1)
probability = np.array((p0, p1, p2))
else:
# Case with ncategory = 1
# -----------------------
c = 1.0
# Define probability map for non-zero category
probability = np.linspace(0., c, nx)
[20]:
# Plot
# ----
# Fill image for display
probability_img = gn.img.Img(nx, 1, 1, sx, 1., 1., 0., 0., 0., nv=ncategory, val=probability)
probability_img.sy = .2 * probability_img.sx * probability_img.nx # set spacing in y direction (1 cell) to visualize images using gn.imgplot.drawImage2D
# Display probability maps
plt.subplots(ncategory, 1, figsize=(10,8), sharey=True)
for i in range(ncategory):
plt.subplot(ncategory, 1, 1+i)
gn.imgplot.drawImage2D(probability_img, iv=i, title = f'Probability for categ. {categVal[i]}')
plt.show()
Settings - using data (optional)
[21]:
if ncategory > 1:
# Case with ncategory > 1
# -----------------------
# Data
x = [50.5, 300.1, 550.2, 849.4] # data locations (real coordinates)
v = [ 1., 2., 1., 3.] # data values
# x = None
# v = None
# Probability : `probability` defined above
# Type of kriging
method = 'simple_kriging'
else:
# Case with ncategory = 1
# -----------------------
# Data
x = [50.5, 300.1, 550.2, 849.4] # data locations (real coordinates)
v = [ 0., 2., 2., 0.] # data values
# x = None
# v = None
# Probability : `probability` defined above
# Type of kriging
method = 'simple_kriging'
Estimation of probabilities (by kriging)
[22]:
# Computational resources
nthreads = 8
t1 = time.time() # start time
geosclassic_output = gn.geosclassicinterface.estimateIndicator(
category_values, # list of categories (required)
cov_model, # covariance model(s) (required)
nx, sx, ox, # grid geometry (nx is required)
x=x, v=v, # data
probability=probability, # probability
method=method, # type of kriging
use_unique_neighborhood=True, # search neighborhood ...
# searchRadius=None,
# searchRadiusRelative=1.2,
nneighborMax=12,
nthreads=nthreads, # computational resources
verbose=2 # verbose mode
)
t2 = time.time() # end time
print('Elapsed time: {:.2g} sec'.format(t2-t1))
krig_img = geosclassic_output['image'] # output image
estimateIndicator: call `run_MPDSOMPGeosClassicIndicatorSim` [1 process of 8 thread(s) (OpenMP)] ...
estimateIndicator: `run_MPDSOMPGeosClassicIndicatorSim` [1 process] complete
Elapsed time: 0.0032 sec
[23]:
# Total number of warning(s), and warning messages
geosclassic_output['nwarning'], geosclassic_output['warnings']
[23]:
(0, [])
[24]:
# %%script false --no-raise-error # skip this cell! (comment this line to run the cell)
# Equivalent, using other computational resources
# -----------------------------------------------
# Computational resources
nthreads = 1
t1 = time.time() # start time
geosclassic_output = gn.geosclassicinterface.estimateIndicator(
category_values, # list of categories (required)
cov_model, # covariance model(s) (required)
nx, sx, ox, # grid geometry (nx is required)
x=x, v=v, # data
probability=probability, # probability
method=method, # type of kriging
use_unique_neighborhood=True, # search neighborhood ...
# searchRadius=None,
# searchRadiusRelative=1.2,
nneighborMax=12,
nthreads=nthreads, # computational resources
verbose=2 # verbose mode
)
t2 = time.time() # end time
print('Elapsed time: {:.2g} sec'.format(t2-t1))
krig_img_2 = geosclassic_output['image'] # output image
print(f"Same results ? {np.allclose(krig_img.val, krig_img_2.val)}")
estimateIndicator: call `run_MPDSOMPGeosClassicIndicatorSim` [1 process of 1 thread(s) (OpenMP)] ...
estimateIndicator: `run_MPDSOMPGeosClassicIndicatorSim` [1 process] complete
Elapsed time: 0.0059 sec
Same results ? True
Simulations
[25]:
# Number of realizations
nreal = 1000
# Seed
seed = 321
# Computational resources
nproc = 2
nthreads_per_proc = 4
t1 = time.time() # start time
geosclassic_output = gn.geosclassicinterface.simulateIndicator(
category_values, # list of categories (required)
cov_model, # covariance model(s) (required)
nx, sx, ox, # grid geometry (nx is required)
x=x, v=v, # data
probability=probability, # probability
method=method, # type of kriging
searchRadius=None, # search neighborhood ...
searchRadiusRelative=1.2,
nneighborMax=12,
nreal=nreal, # number of realizations
seed=seed, # seed
nproc=nproc, # computational resources ...
nthreads_per_proc=nthreads_per_proc,
verbose=2 # verbose mode
)
t2 = time.time() # end time
print('Elapsed time: {:.2g} sec'.format(t2-t1))
simul_img = geosclassic_output['image'] # output image
simulateIndicator: call `run_MPDSOMPGeosClassicIndicatorSim` [2 process(es) of 4 thread(s) (OpenMP)] ...
simulateIndicator: `run_MPDSOMPGeosClassicIndicatorSim` [2 process(es)] complete
Elapsed time: 2.7 sec
[26]:
# Total number of warning(s), and warning messages
geosclassic_output['nwarning'], geosclassic_output['warnings']
[26]:
(0, [])
[27]:
# %%script false --no-raise-error # skip this cell! (comment this line to run the cell)
# Equivalent, using other computational resources
# -----------------------------------------------
# Computational resources
nproc = 1
nthreads_per_proc = 1
t1 = time.time() # start time
geosclassic_output = gn.geosclassicinterface.simulateIndicator(
category_values, # list of categories (required)
cov_model, # covariance model(s) (required)
nx, sx, ox, # grid geometry (nx is required)
x=x, v=v, # data
probability=probability, # probability
method=method, # type of kriging
searchRadius=None, # search neighborhood ...
searchRadiusRelative=1.2,
nneighborMax=12,
nreal=nreal, # number of realizations
seed=seed, # seed
nproc=nproc, # computational resources ...
nthreads_per_proc=nthreads_per_proc,
verbose=2 # verbose mode
)
t2 = time.time() # end time
print('Elapsed time: {:.2g} sec'.format(t2-t1))
simul_img_2 = geosclassic_output['image'] # output image
print(f"Same results ? {np.allclose(simul_img.val, simul_img_2.val)}")
simulateIndicator: call `run_MPDSOMPGeosClassicIndicatorSim` [1 process of 1 thread(s) (OpenMP)] ...
simulateIndicator: `run_MPDSOMPGeosClassicIndicatorSim` [1 process] complete
Elapsed time: 12 sec
Same results ? True
Plot the results
[28]:
# Set sapcing (cell size) in y direction (1 cell in 1D) to visualize images using gn.imgplot.drawImage2D
sy = 0.2 * (simul_img.xmax() - simul_img.xmin())
simul_img.sy = sy
krig_img.sy = sy
if x is not None:
# Set y-coordinates for conditioning data points for visualization
y = len(x) * [simul_img.oy + 0.5*simul_img.sy]
[29]:
# Compute proportion of each category (pixel-wise)
simul_img_prop = gn.img.imageCategProp(simul_img, category_values)
[30]:
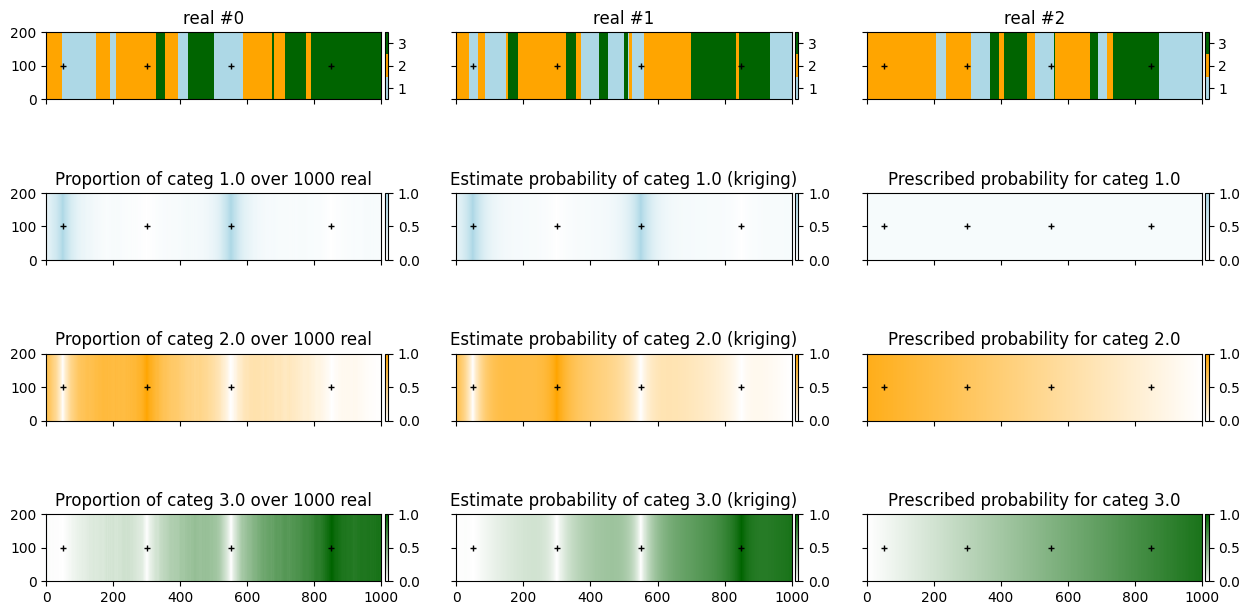
# Plot
plt.subplots(1+ncategory, 3, figsize=(15, (1+ncategory)*2), sharex=True, sharey=True)
for i in range(3):
plt.subplot(1+ncategory, 3, i+1)
gn.imgplot.drawImage2D(simul_img, iv=i, categ=True, categVal=categVal, categCol=categCol)
if x is not None:
plt.plot(x, y, '+', c='black', markersize=5) # add conditioning point locations
plt.title(f'real #{i}')
for i in range(ncategory):
plt.subplot(1+ncategory, 3, 3*i+4)
gn.imgplot.drawImage2D(simul_img_prop, iv=i, vmin=0, vmax=1, cmap=cmap_categ[i])
if x is not None:
plt.plot(x, y, '+', c='black', markersize=5) # add conditioning point locations
plt.title(f'Proportion of categ {categVal[i]} over {nreal} real')
plt.subplot(1+ncategory, 3, 3*i+5)
gn.imgplot.drawImage2D(krig_img, iv=i, vmin=0, vmax=1, cmap=cmap_categ[i])
if x is not None:
plt.plot(x, y, '+', c='black', markersize=5) # add conditioning point locations
plt.title(f'Estimate probability of categ {categVal[i]} (kriging)')
plt.subplot(1+ncategory, 3, 3*i+6)
gn.imgplot.drawImage2D(probability_img, iv=i, vmin=0, vmax=1, cmap=cmap_categ[i])
if x is not None:
plt.plot(x, y, '+', c='black', markersize=5) # add conditioning point locations
plt.title(f'Prescribed probability for categ {categVal[i]}')
plt.show()
Check results
[31]:
# Check data
# ----------
if x is not None:
# Get index of conditioning location in the grid
data_grid_index = [gn.img.pointToGridIndex(xk, 0, 0, sx, 1., 1., ox, 0., 0.) for xk in x] # (ix, iy, iz) for each data point
# Check estimation
krig_v = [krig_img.val[:, iz, iy, ix] for ix, iy, iz in data_grid_index]
if ncategory == 1:
print(f'Estimation: all data respected ? {np.all(np.asarray(krig_v).reshape(-1) == np.asarray([1 if vi == category_values[0] else 0 for vi in v]))}')
else:
print(f'Estimation: all data respected ? {np.all([np.all(krig_v[i] == np.eye(ncategory)[np.where(np.asarray(category_values) == v[i])[0][0]]) for i in range(len(x))])}')
# Check simulation
sim_v = [simul_img.val[:, iz, iy, ix] for ix, iy, iz in data_grid_index]
print(f'Simulation: all data respected ? {np.all([np.all(sim_v[i] == v[i]) for i in range(len(x))])}')
Estimation: all data respected ? True
Simulation: all data respected ? True