Examples - Notebooks Gallery
Switch to Notebooks List.
Various examples are provided in notebooks below to get started with GEONE.
The notebooks (with related data files) from this doc are available on Github at https://github.com/randlab/geone/tree/master/docs/source/notebooks
Note
In the gallery below, abbreviations are used for the beginning of the original notebook file names:
ex_gc stands for ex_geosclassic
ex_VA stands for ex_vario_analysis
Images and point sets
The following notebooks show how to deal with the classes geone.img.Img for “images” and geone.img.PointSet for “point sets”.
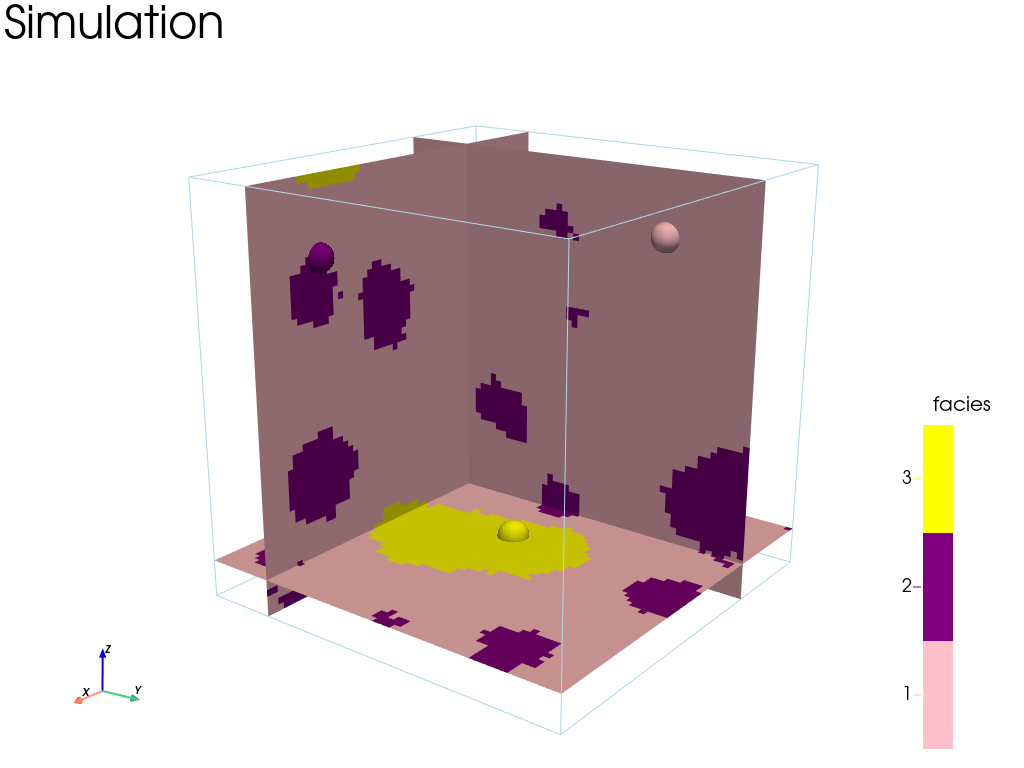
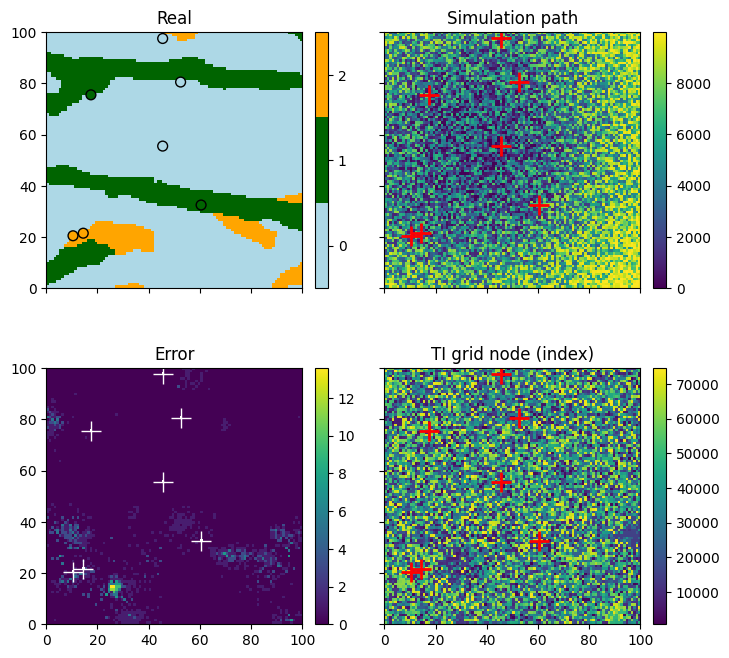
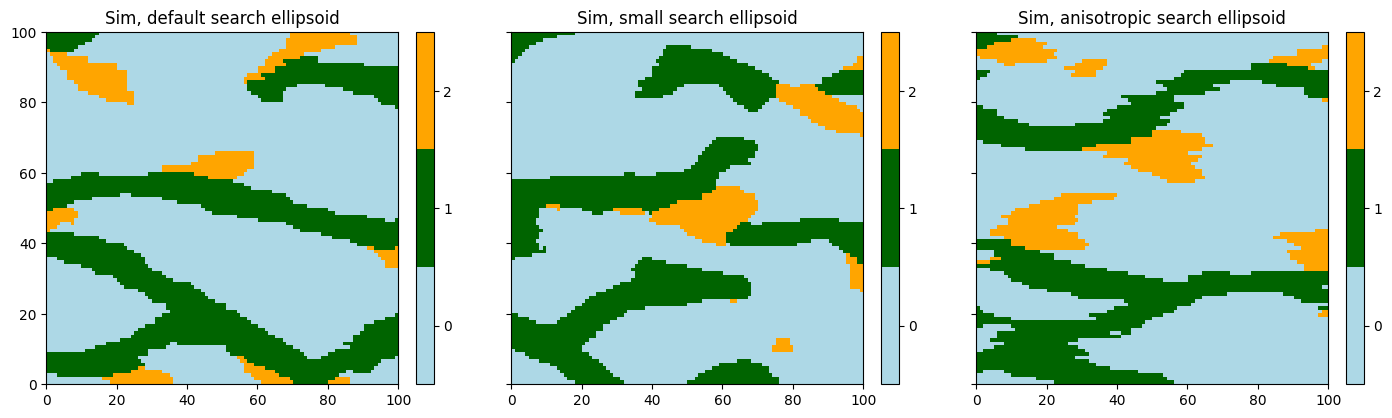
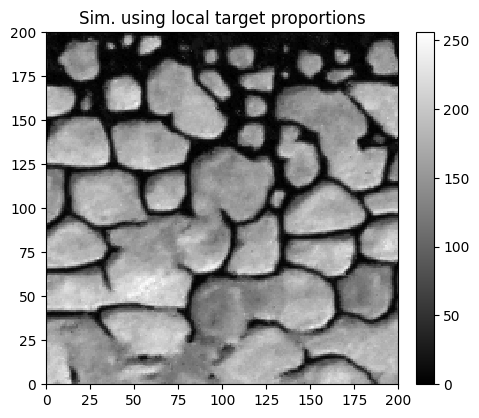
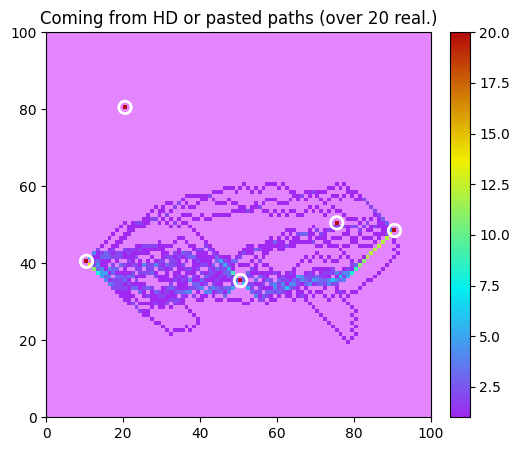
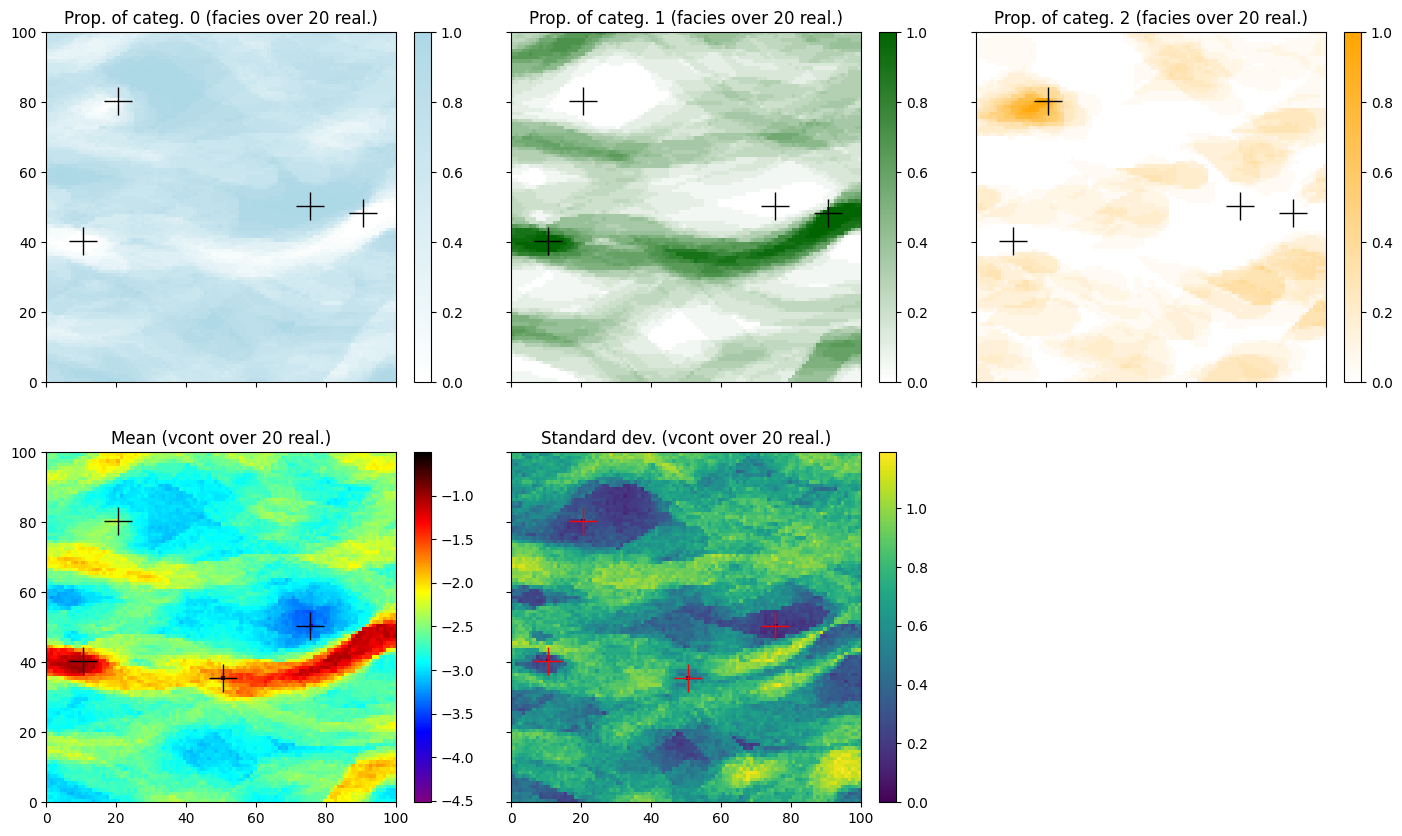
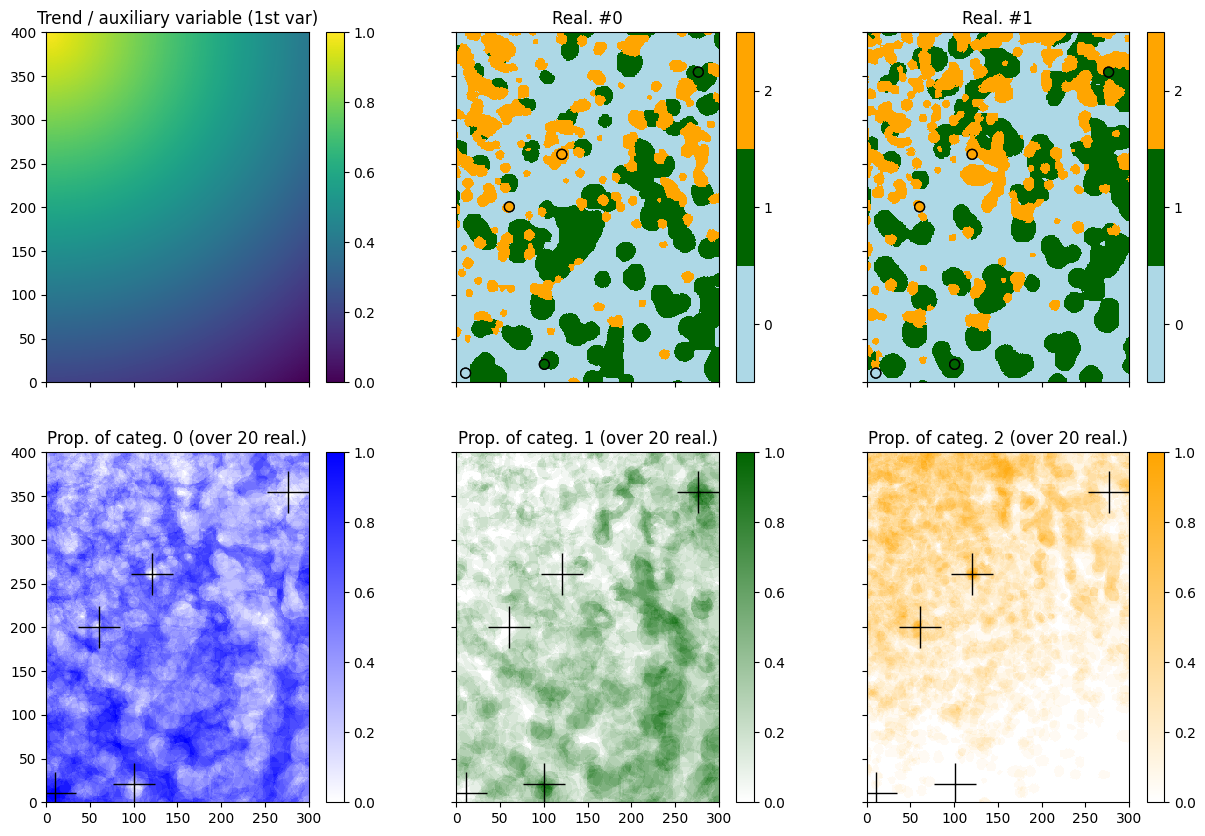
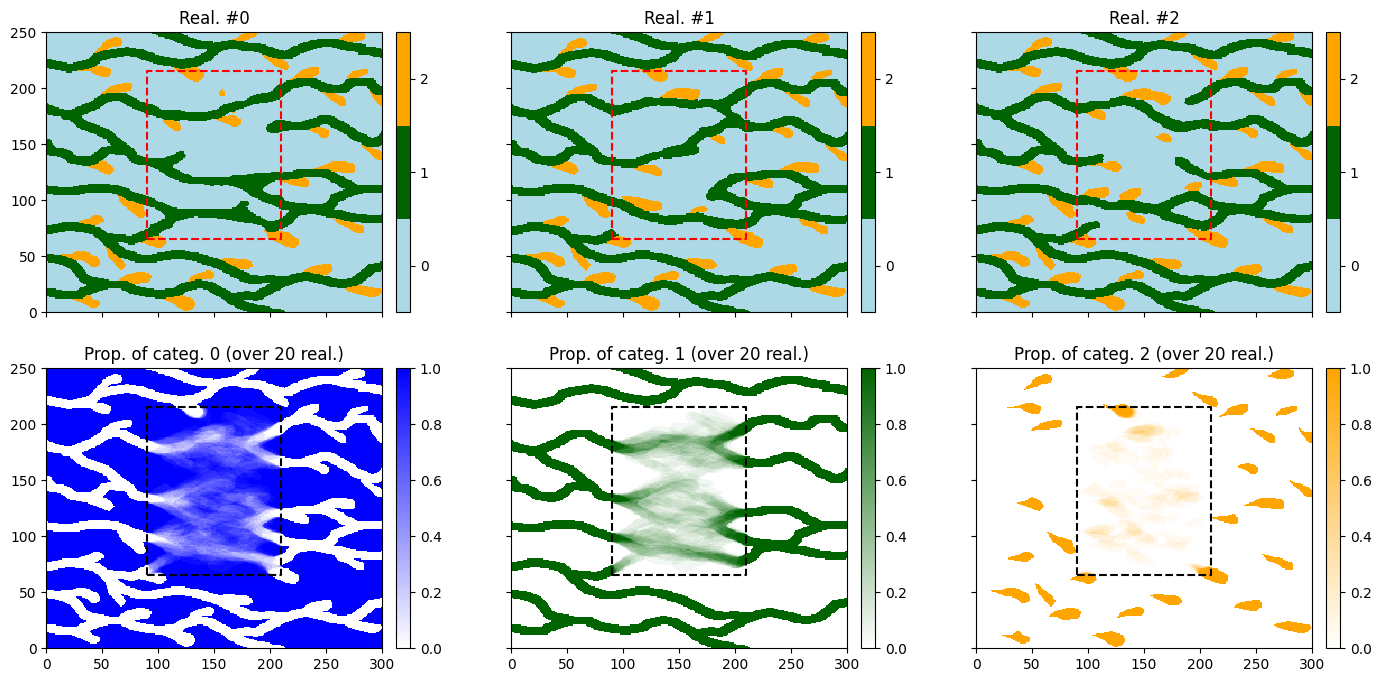
Multiple-point statistics - DEESSE
The following notebooks show how to run DEESSE with its functionalities (options).
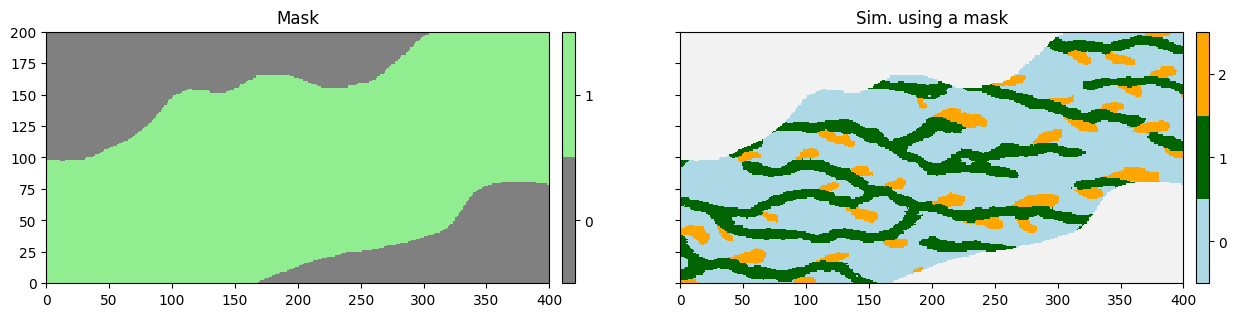
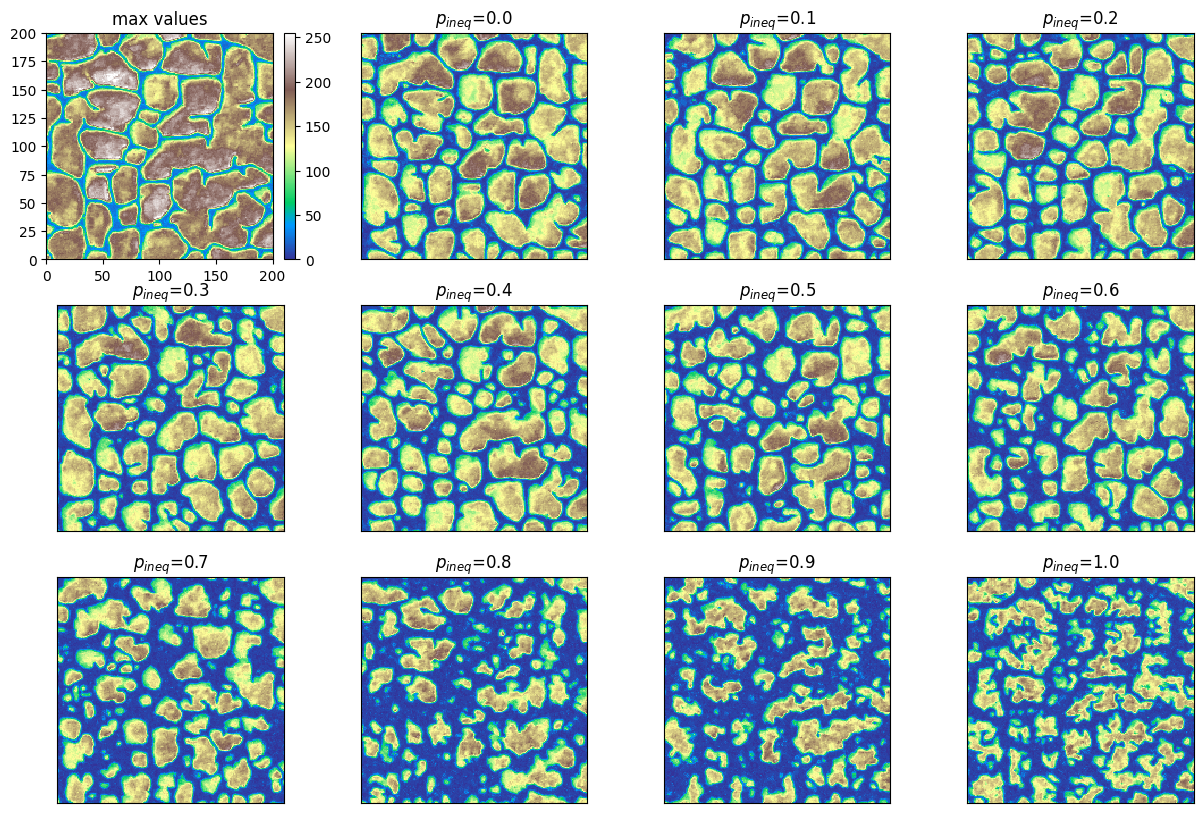
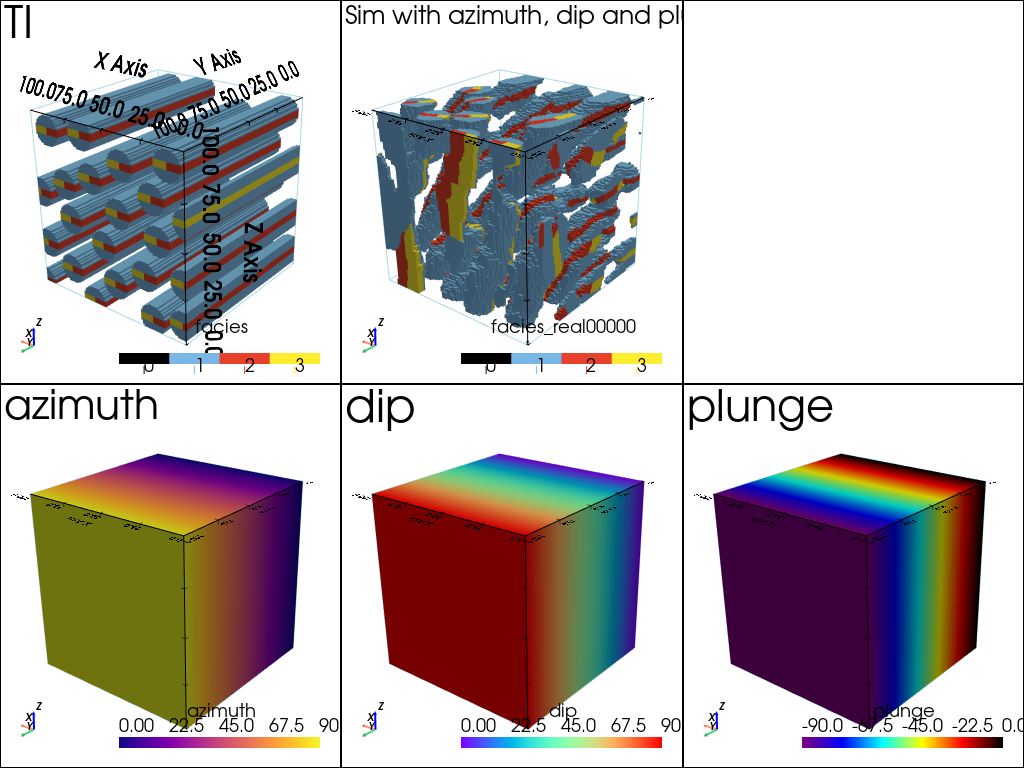
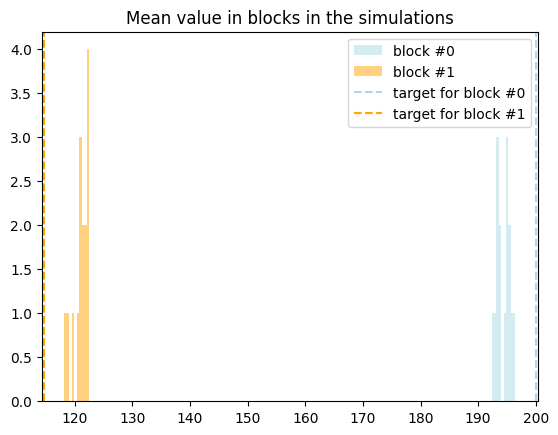
ex_deesse_01 - Getting startedex_deesse_02 - Simulation path and additional outputsex_deesse_03 - Search neighborhoodex_deesse_04 - Continuous simulationsex_deesse_05 - Geometrical transformationex_deesse_06 - Proportion constraintsex_deesse_07 - Connectivity dataex_deesse_08 - Multivariate simulations (I)ex_deesse_09 - Multivariate simulations (II)ex_deesse_10 - Incomplete imagesex_deesse_11 - Using a maskex_deesse_12 - Multiple training data setsex_deesse_13 - Inequality dataex_deesse_14 - Rotation in 3Dex_deesse_15 - Block dataex_deesse_16 - Advanced use of pyramids


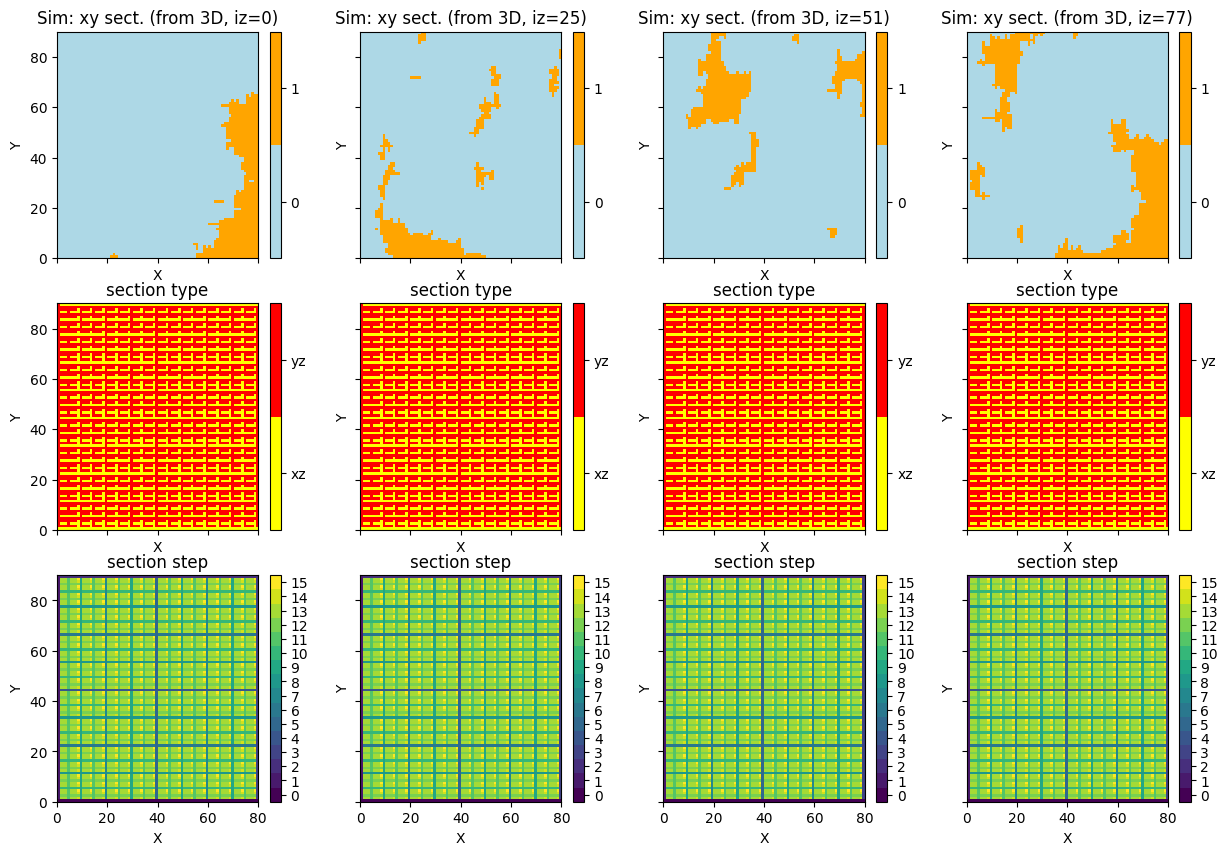
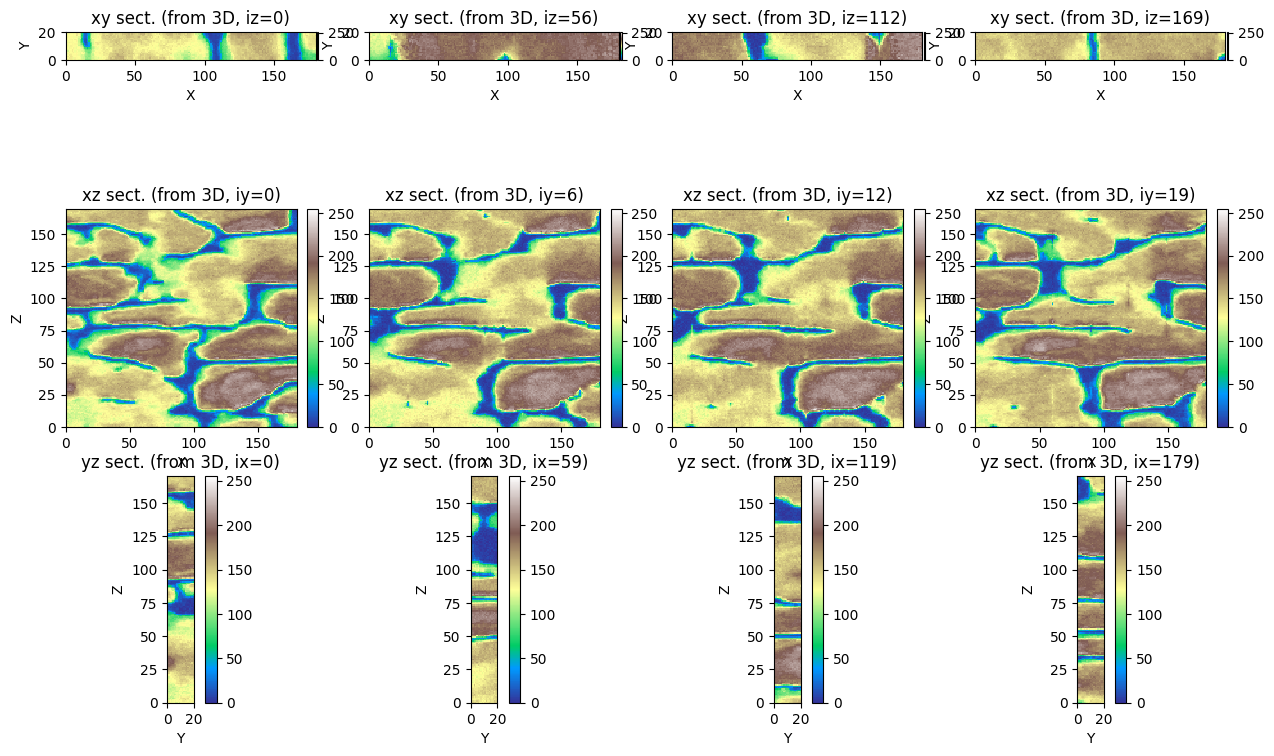
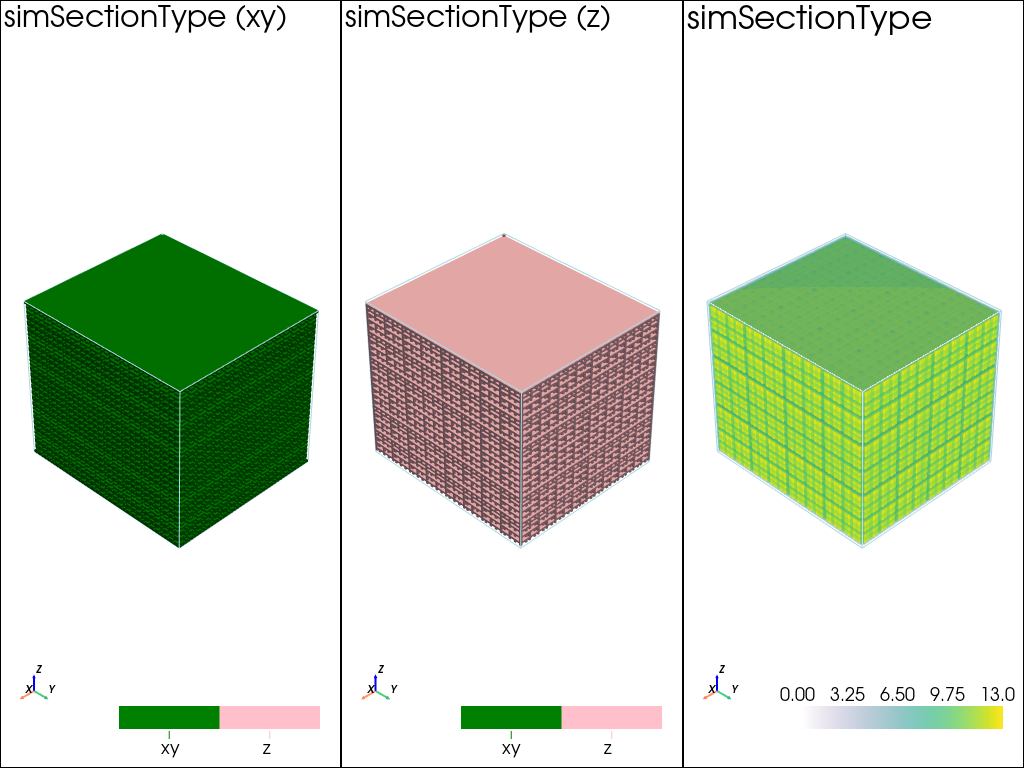
Multiple-point statistics - DEESSEX (“X-simulation”)
The following notebooks show how some examples of crossing-simulation (X-simulation) with DEESSEX.
MultiGaussian estimation and simulation (general function)
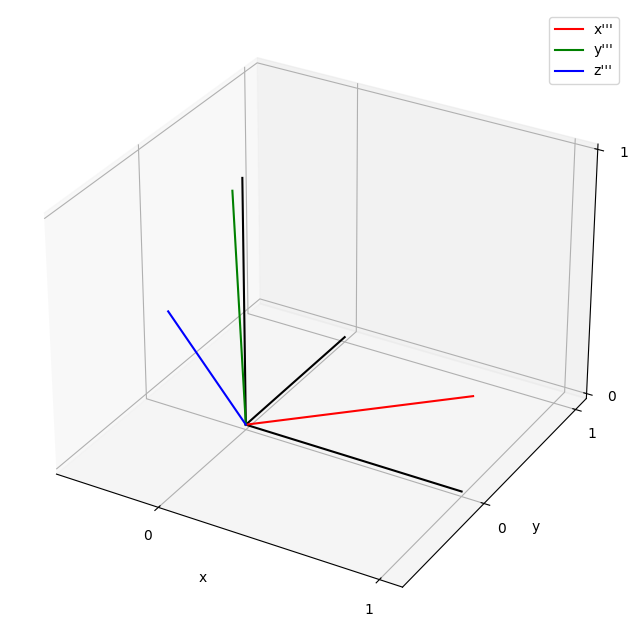
The following notebook shows elementary covariance models, and examples of covariance model in 1D, 2D, 3D, and the use of a general function (wrapper) allowing to launch the other functions of GEONE for multiGaussian estimation and simulation (based on FFT / search neighborhood (GEOSCLASSIC), see below).
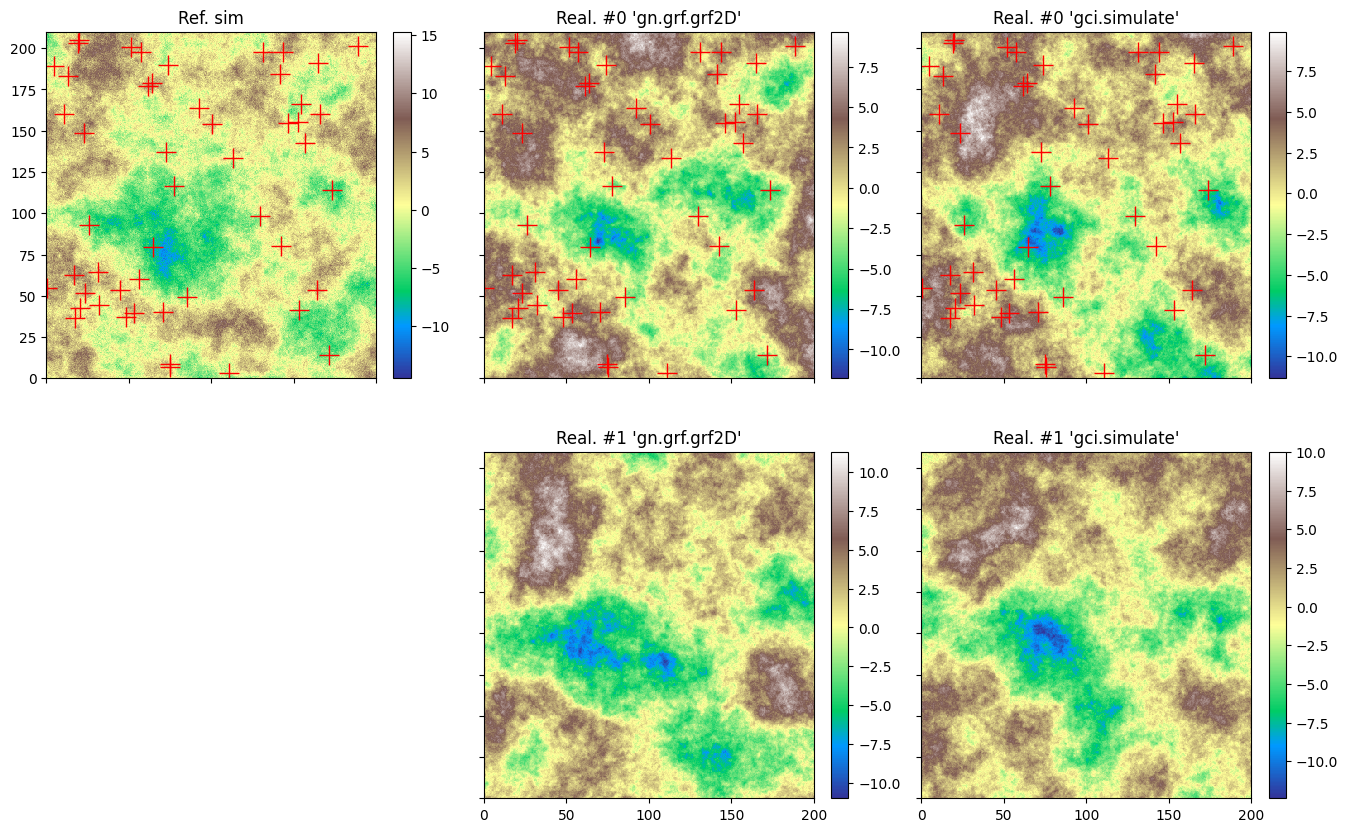
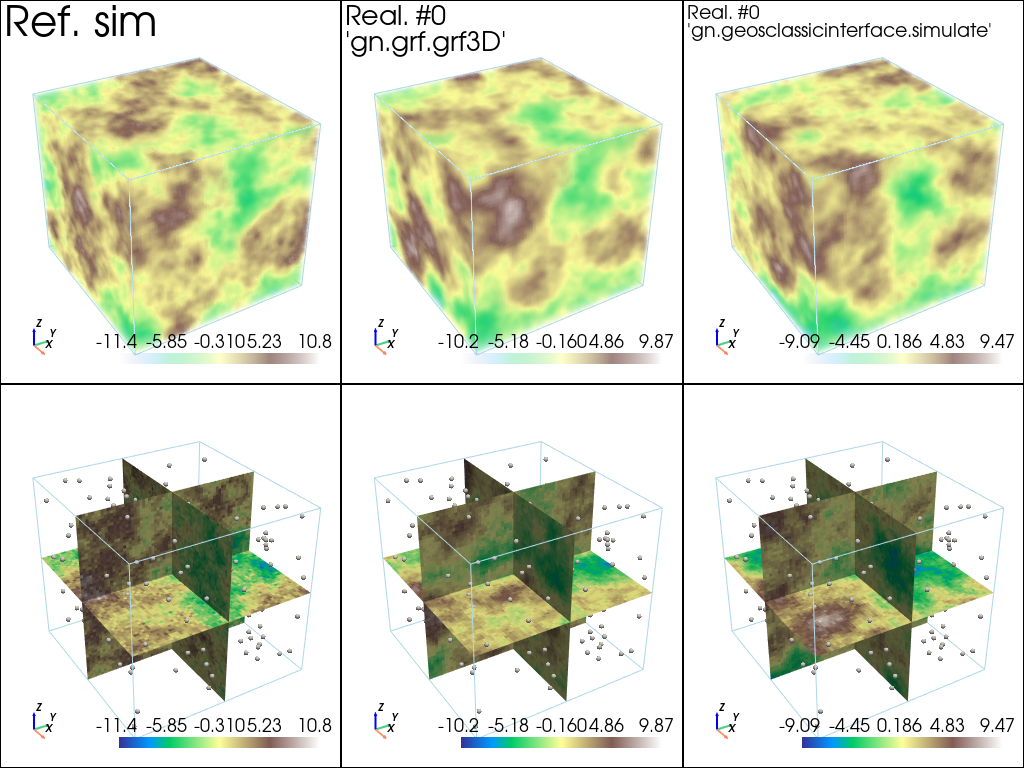
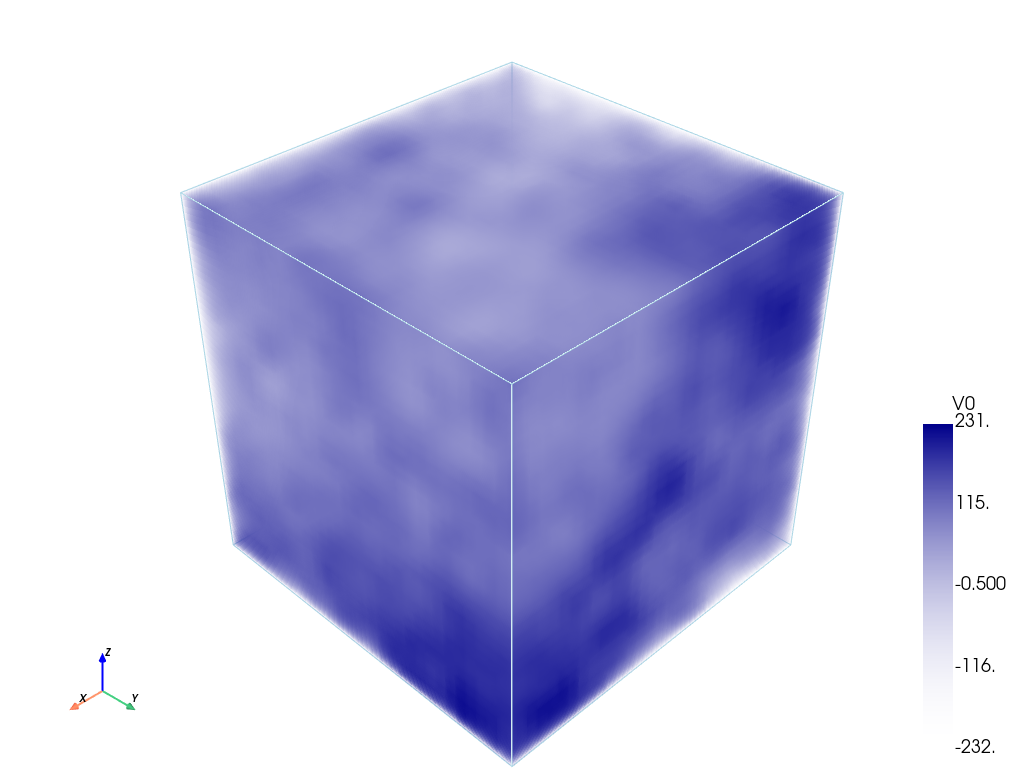
GRF based on FFT
Gaussian random fields (GRF) - simulation and estimation (kriging) in a grid - based on Fast Fourier Transform (FFT).
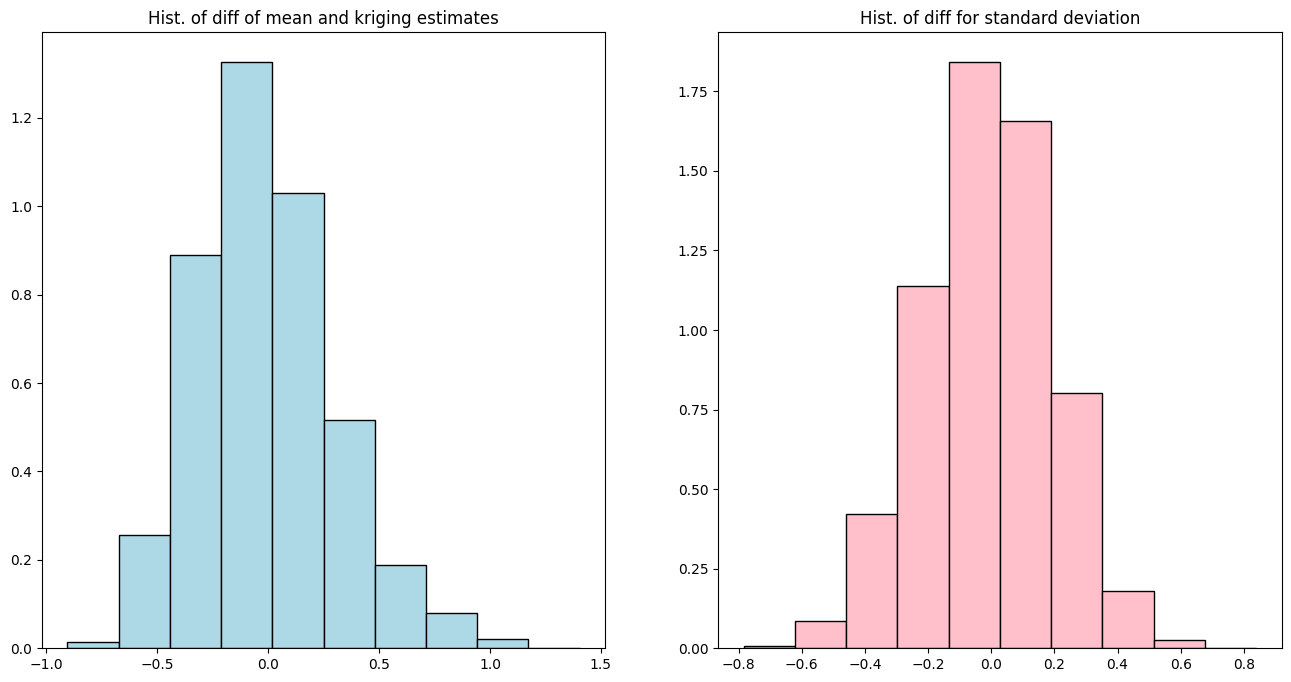
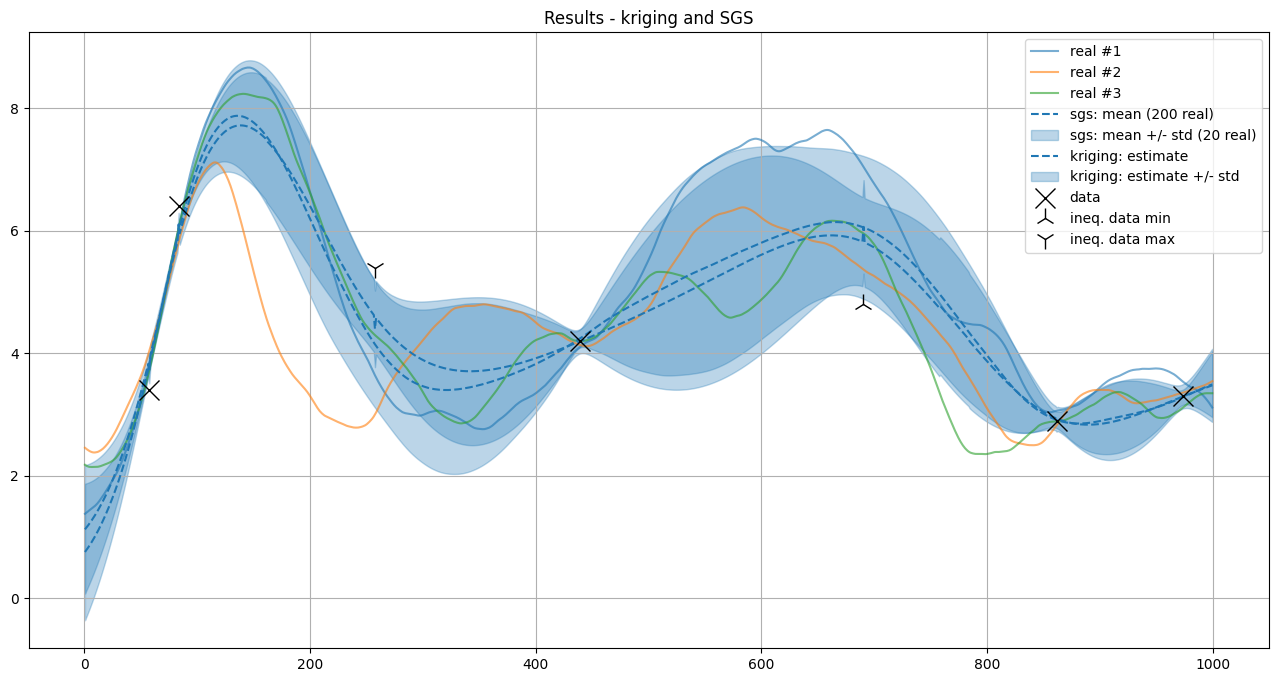
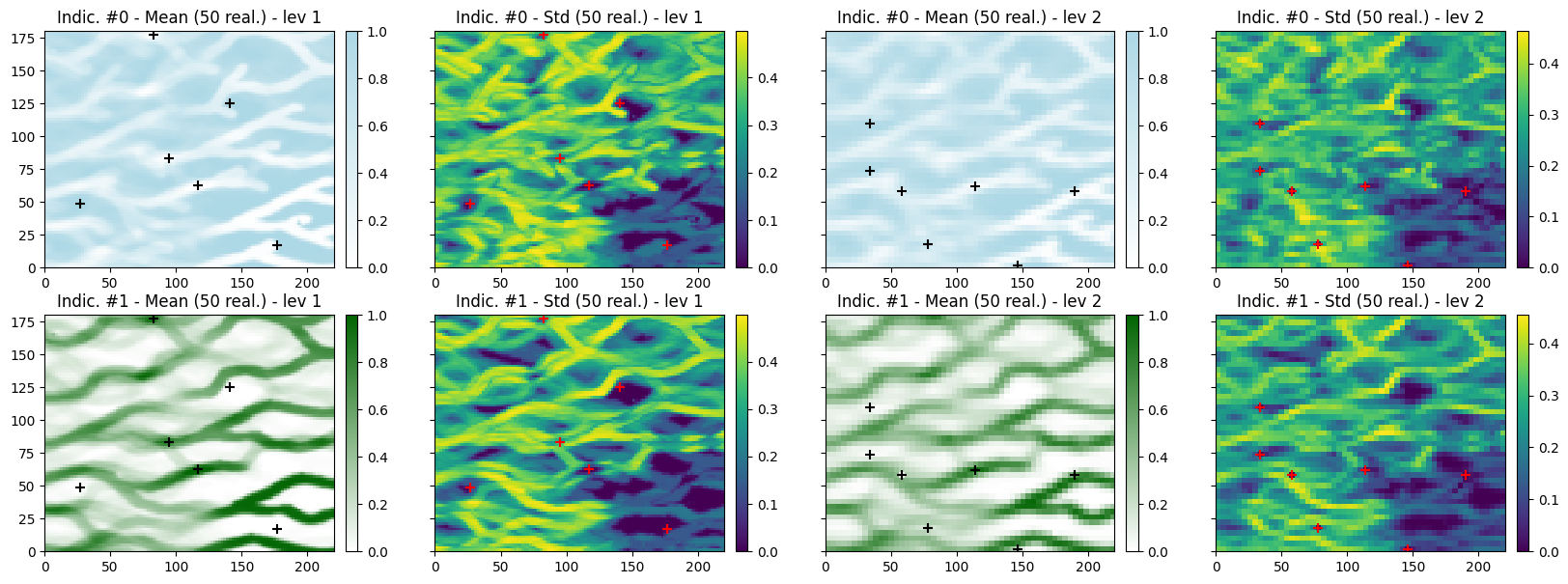
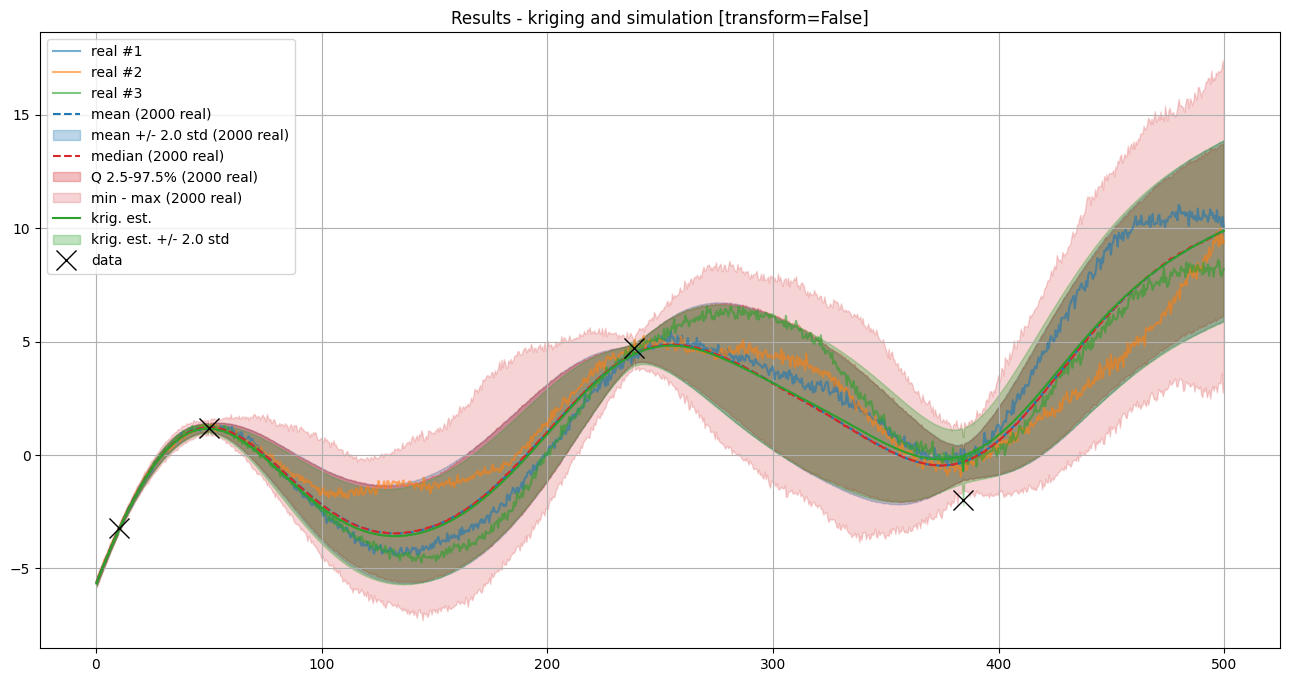
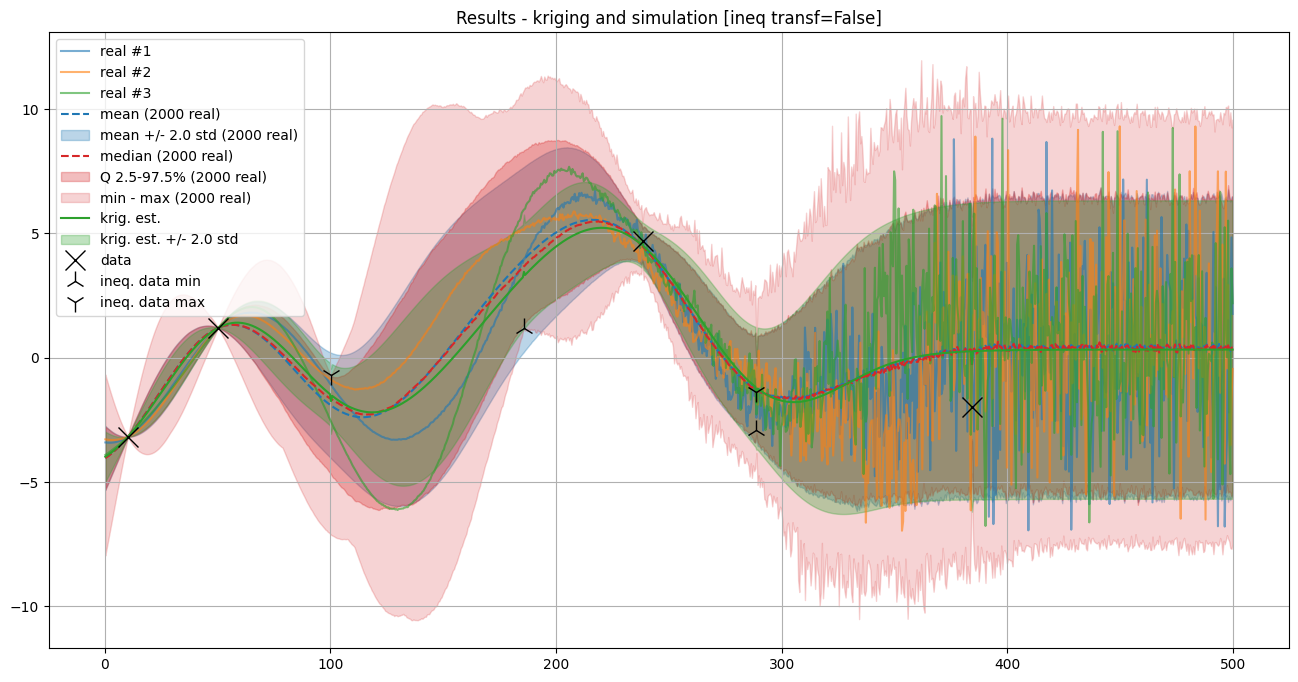
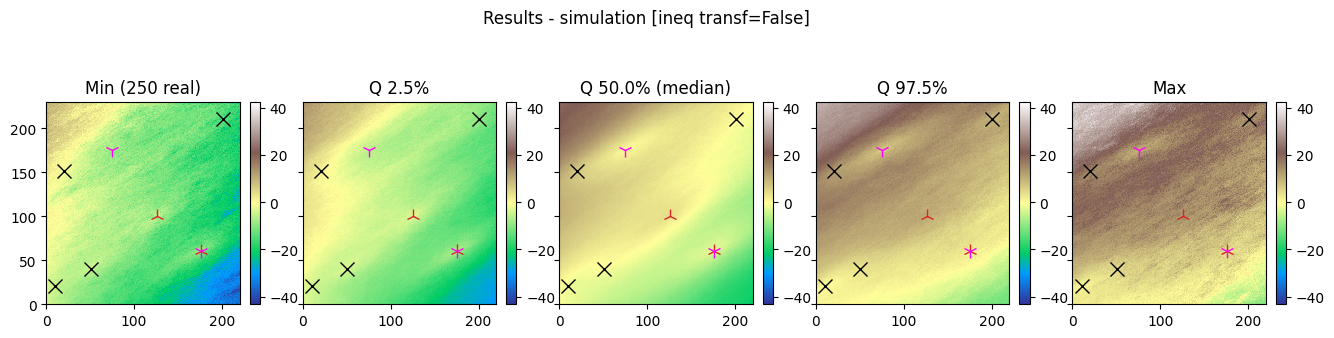
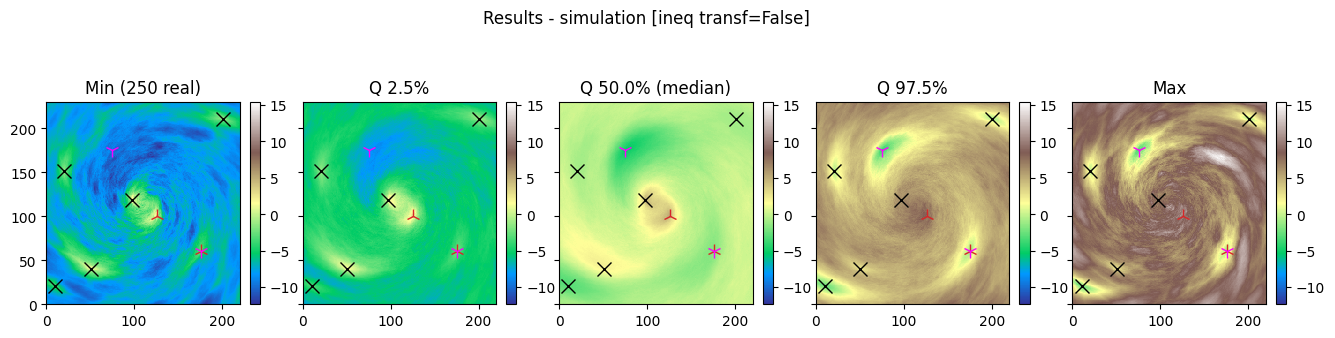
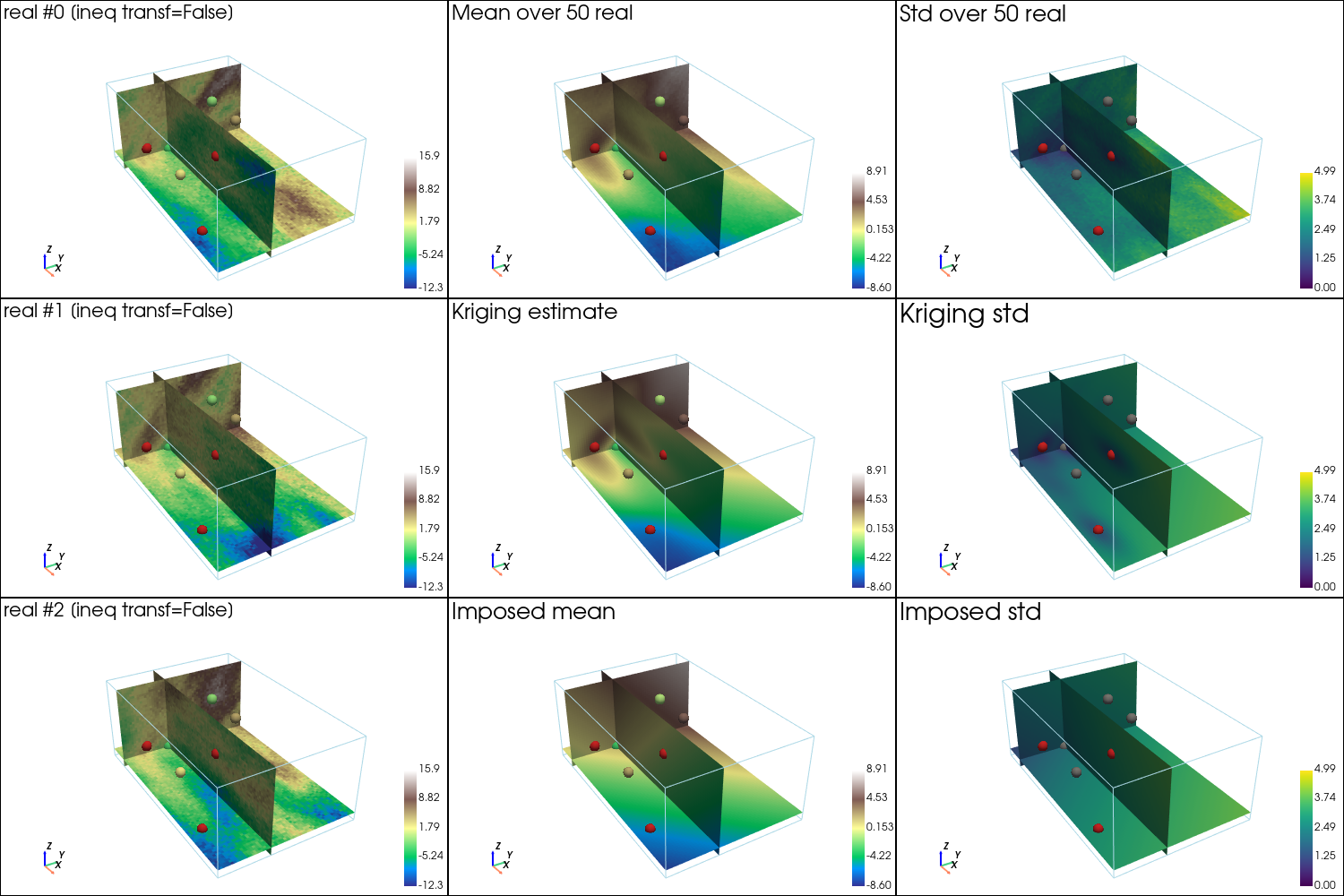
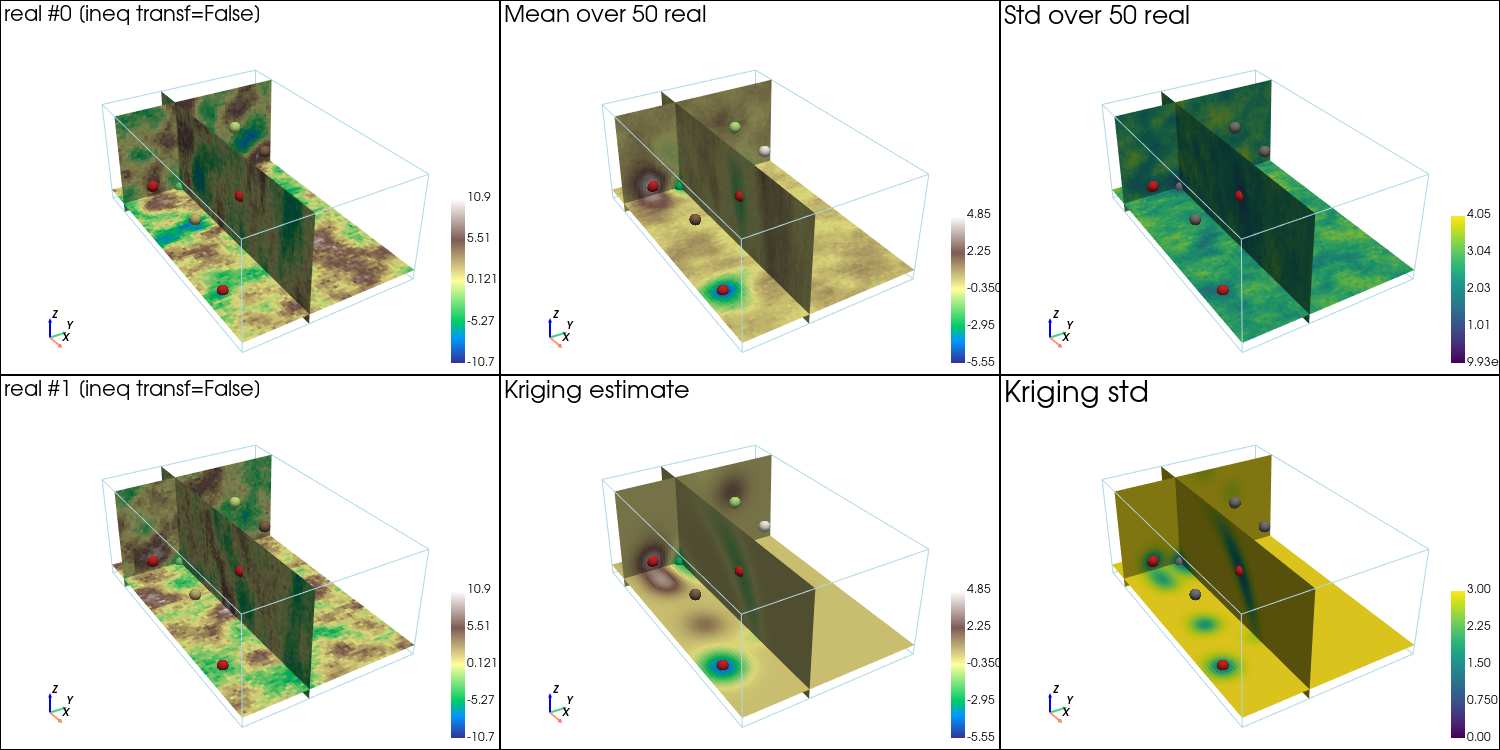
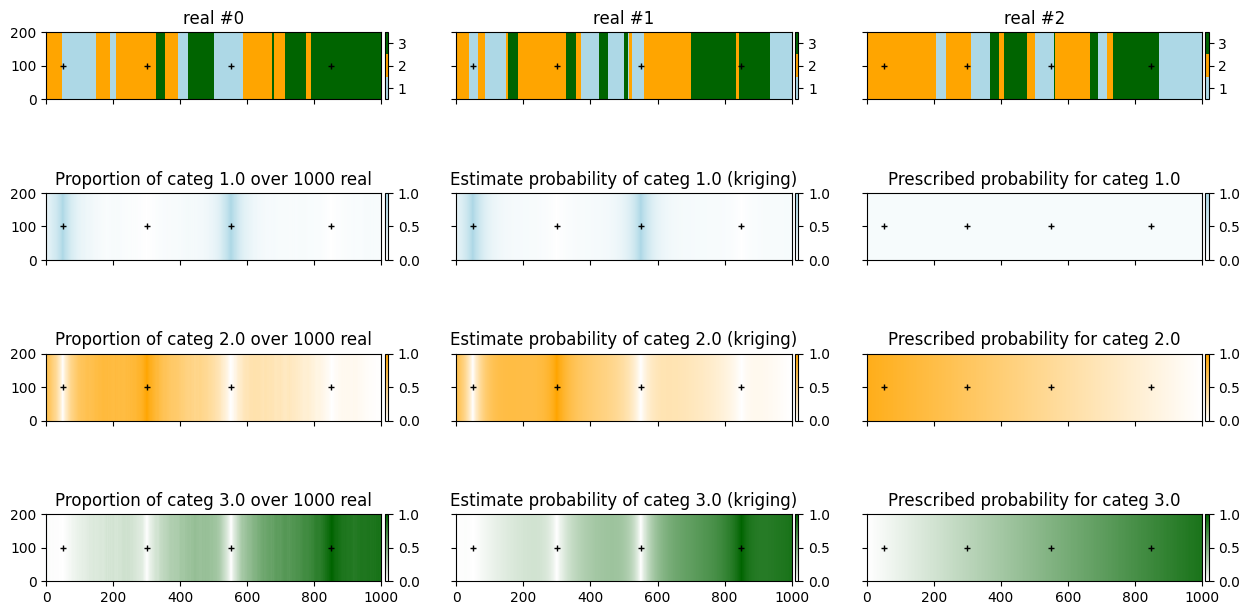
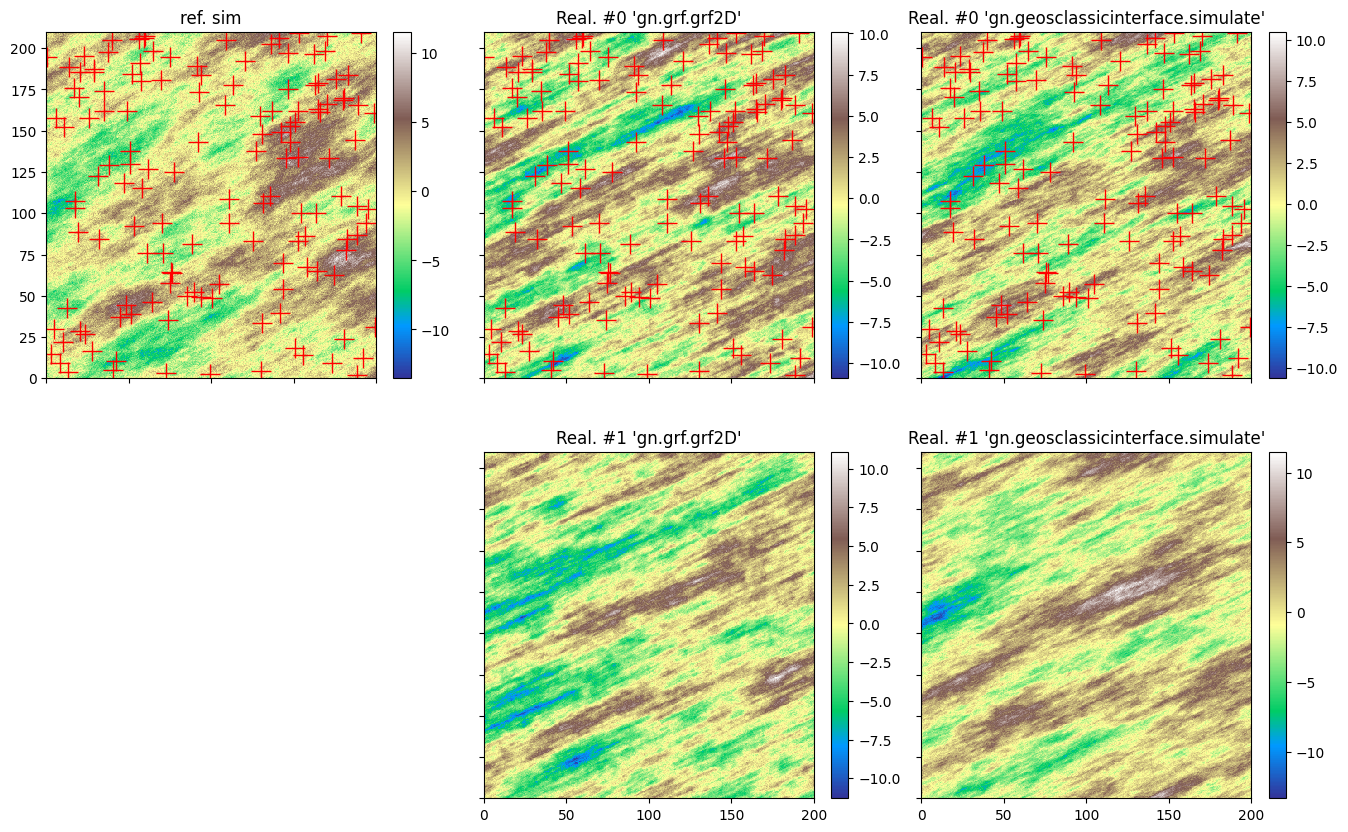
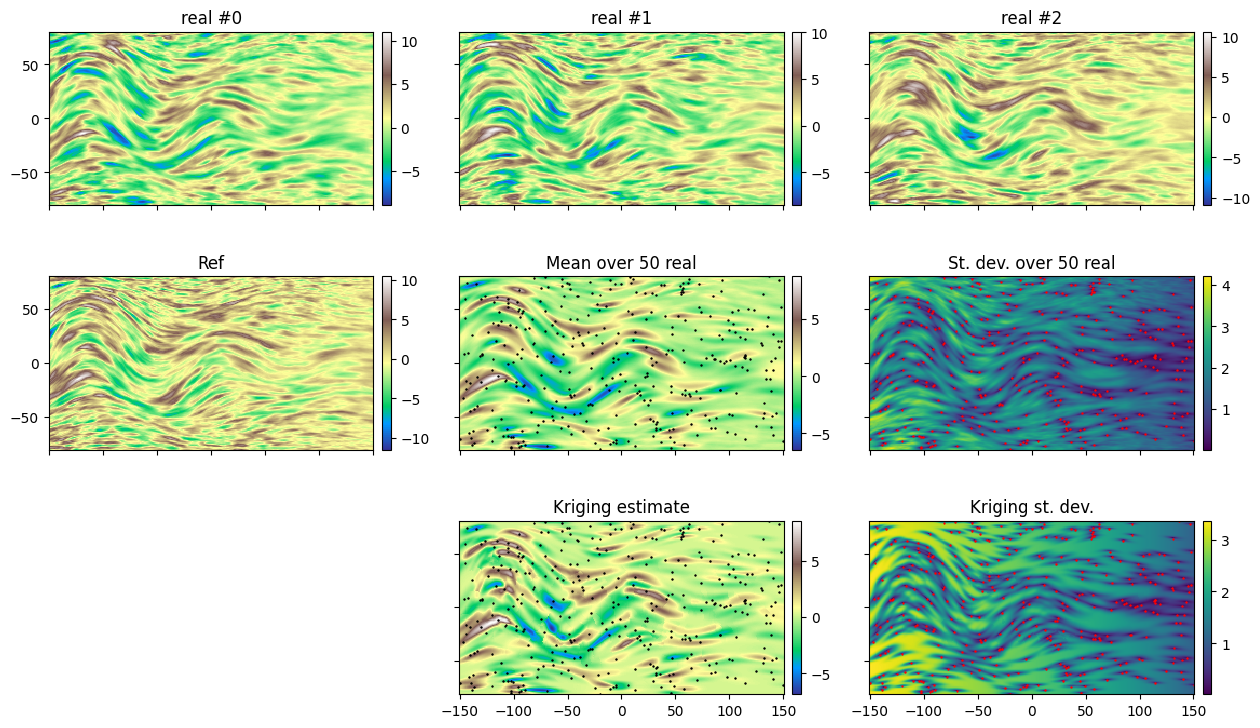
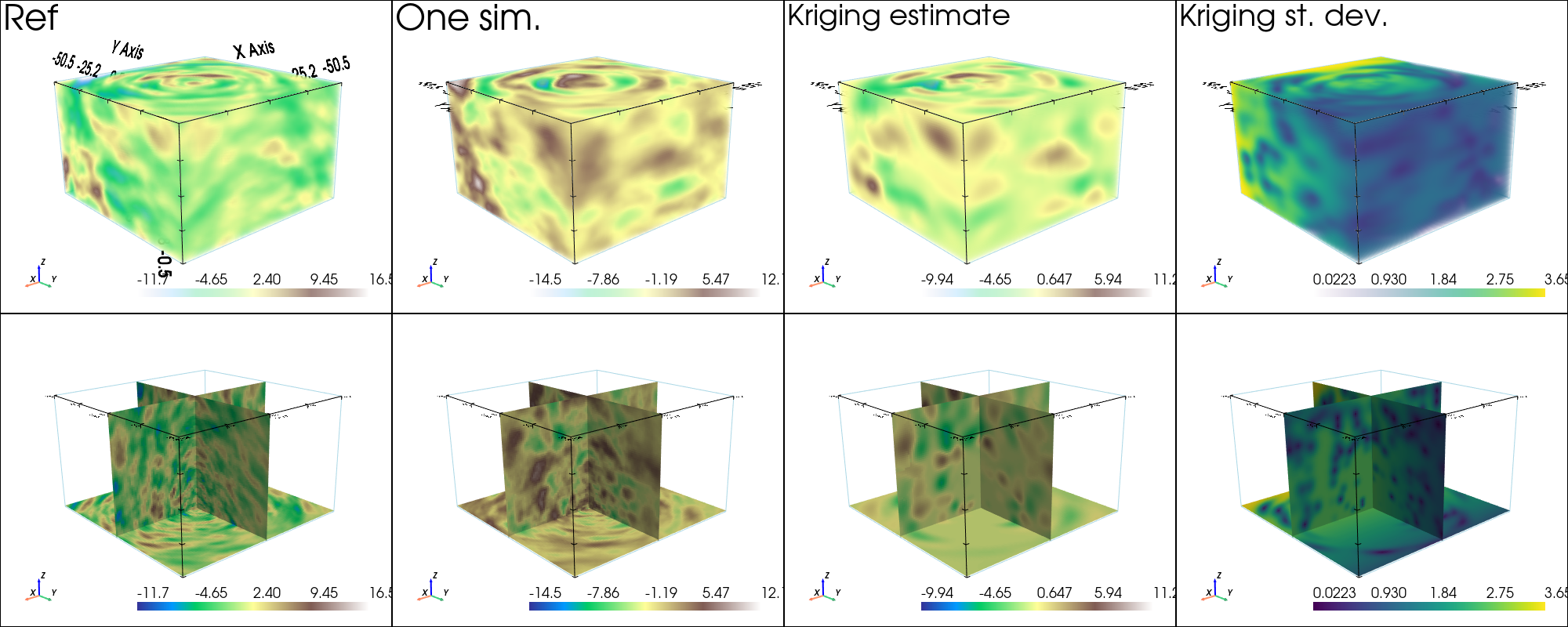
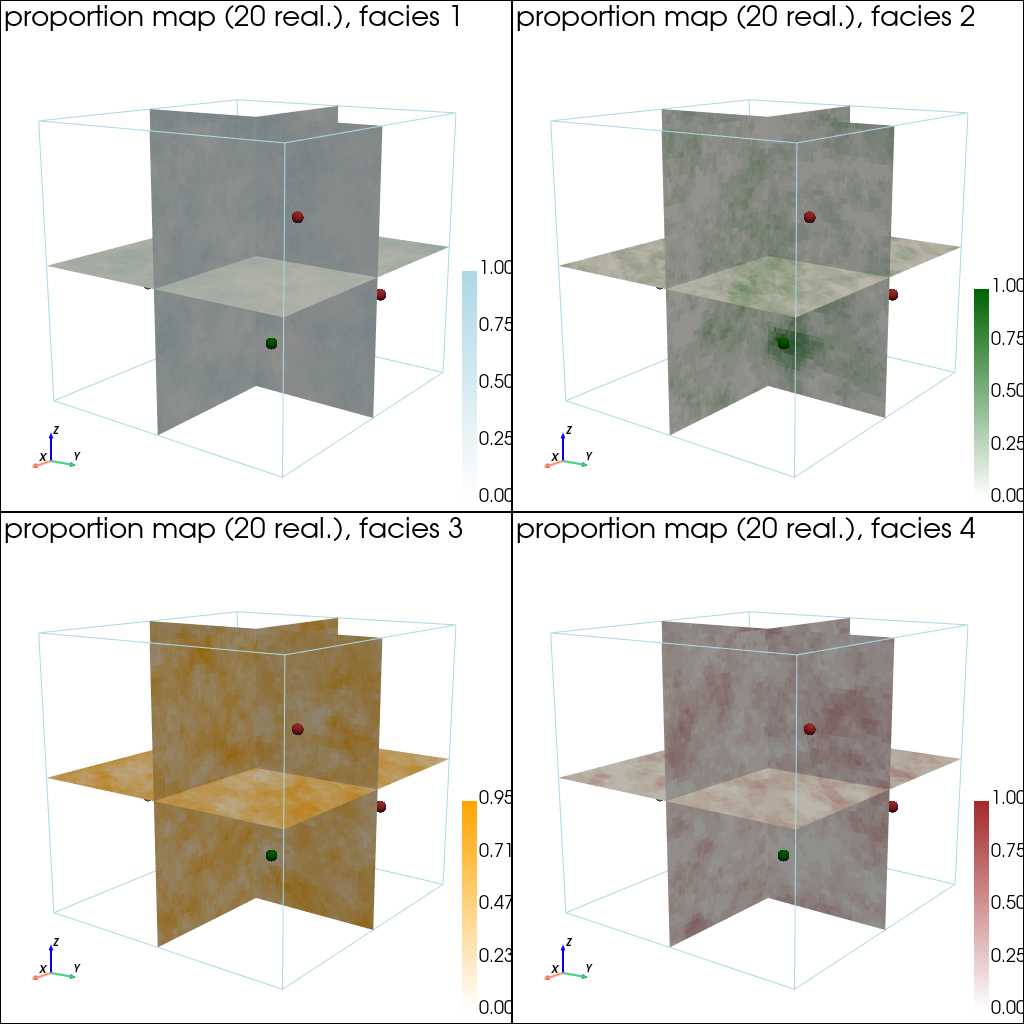
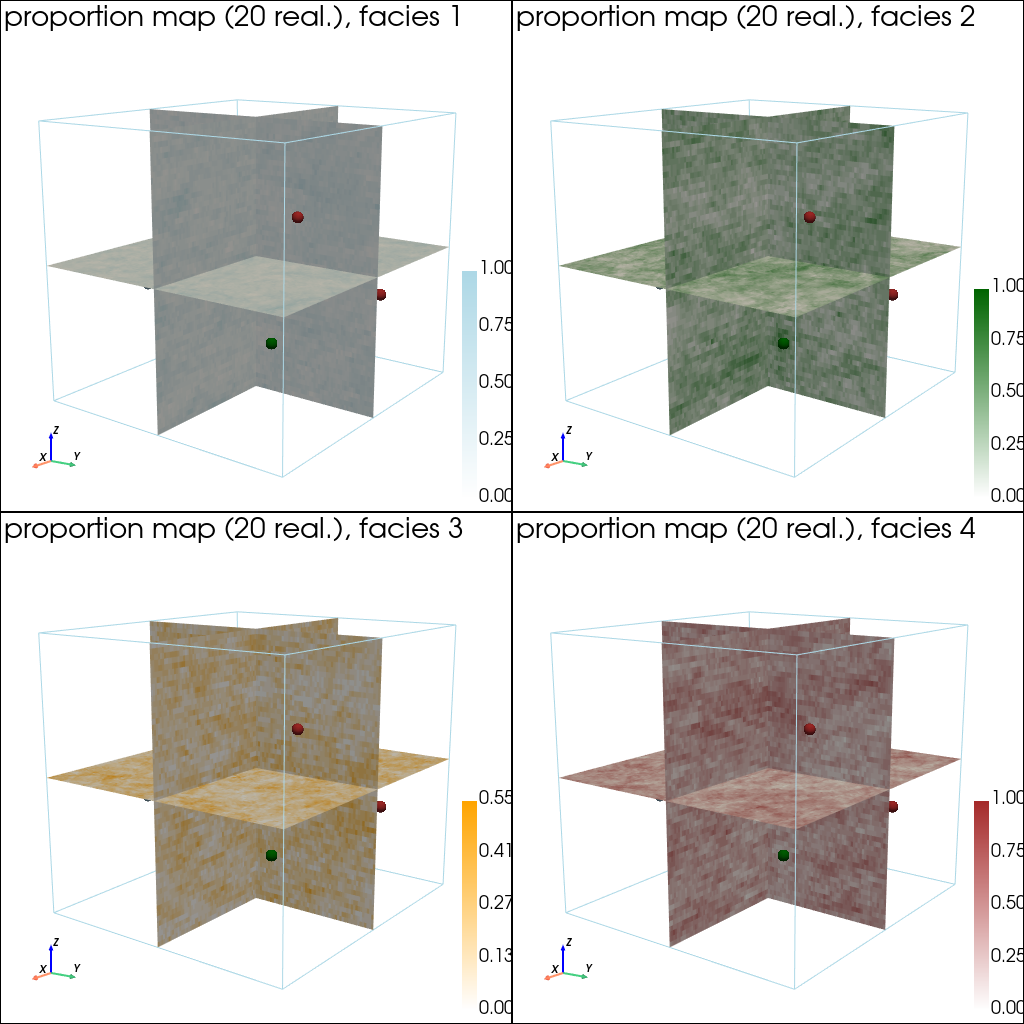
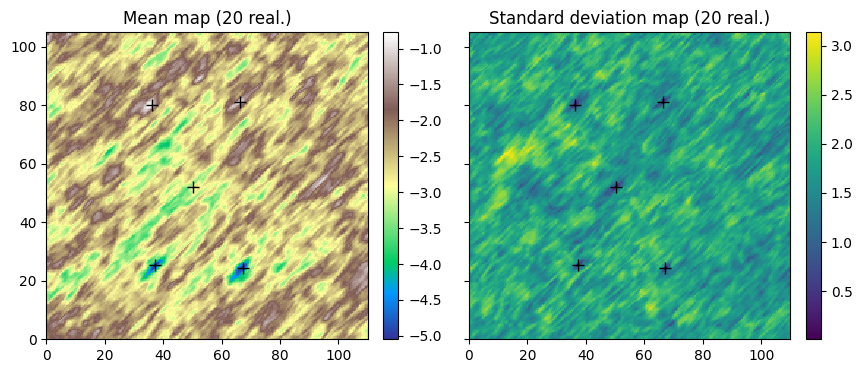
SGS / SIS and kriging based on search neighborhood
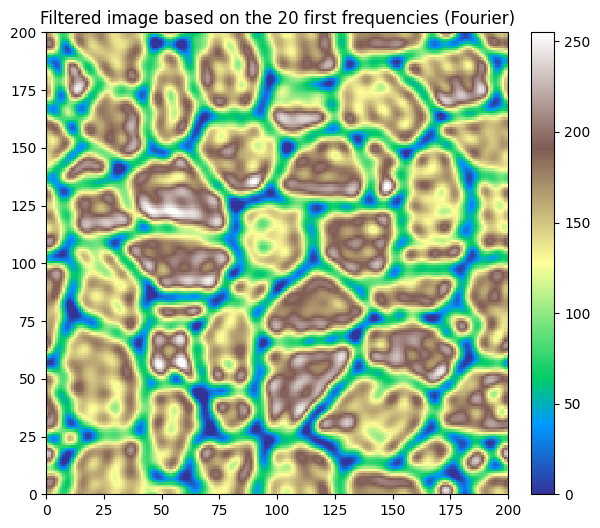
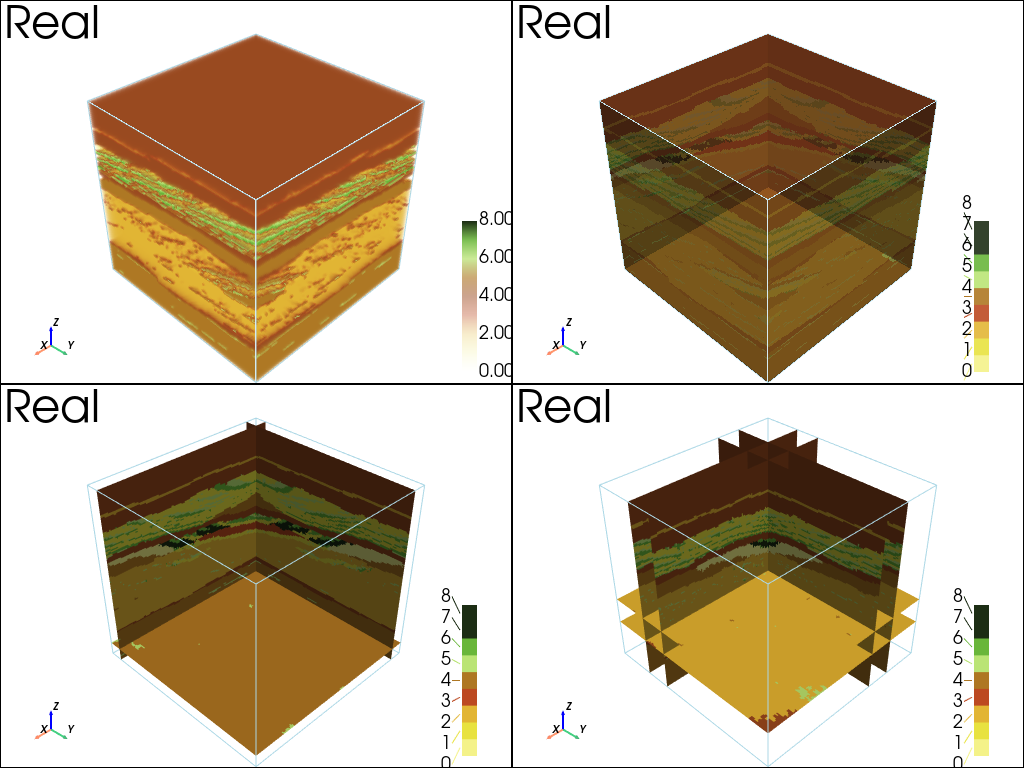
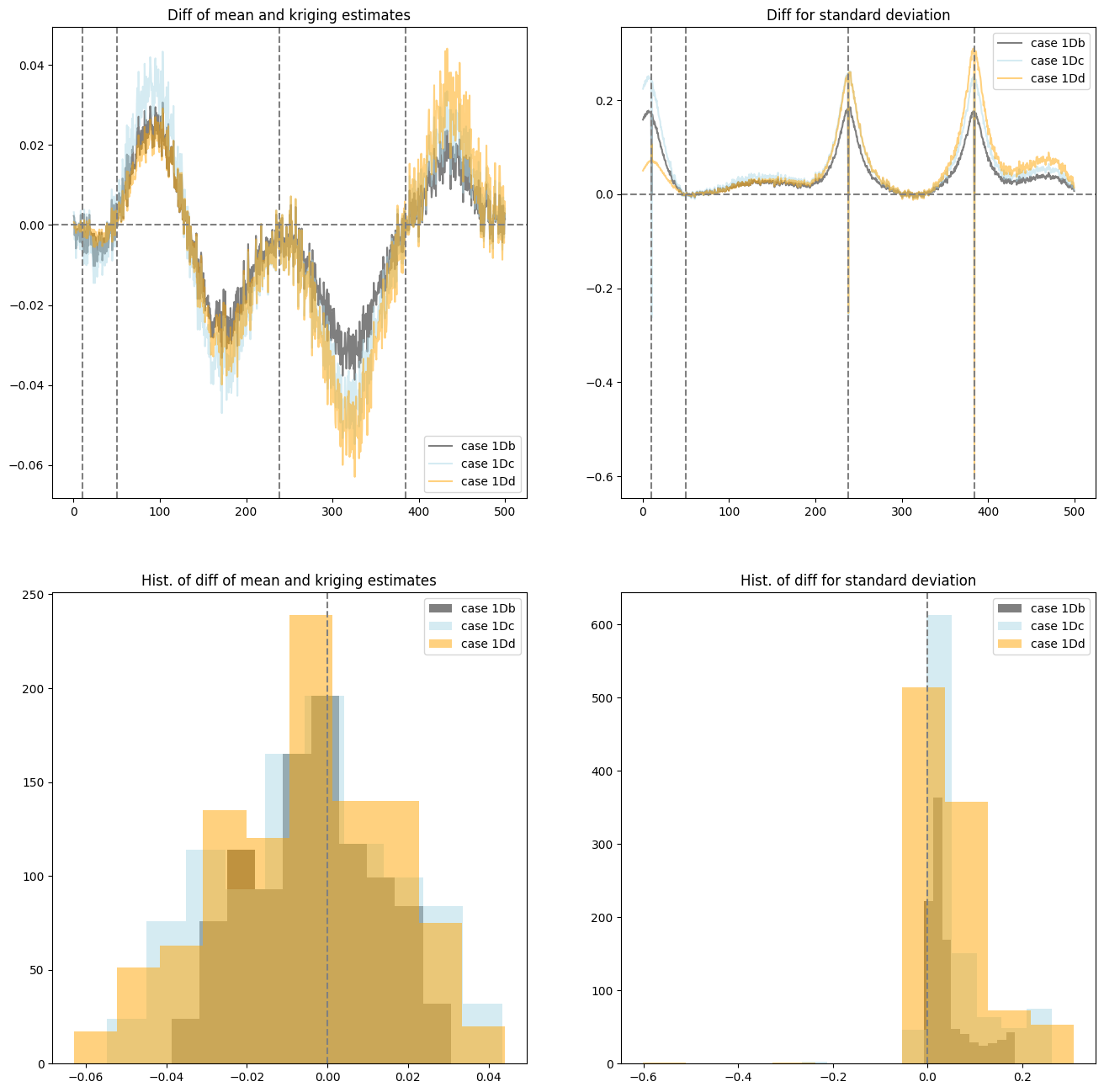
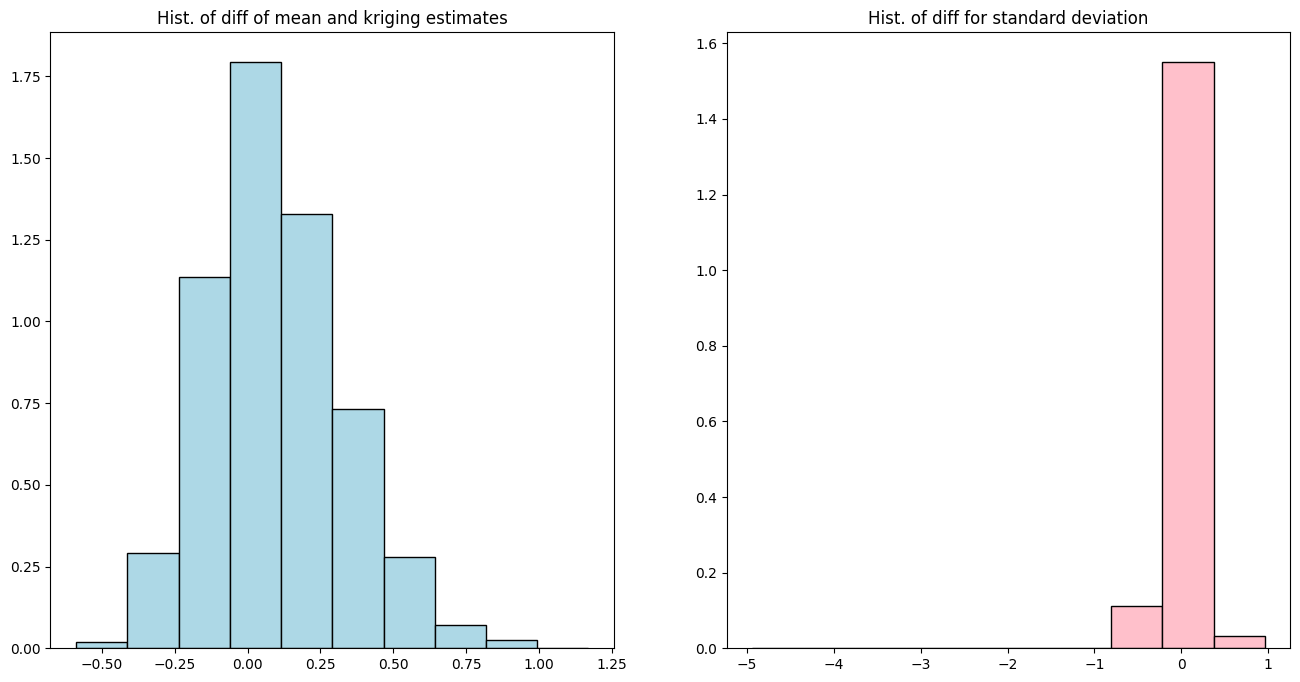
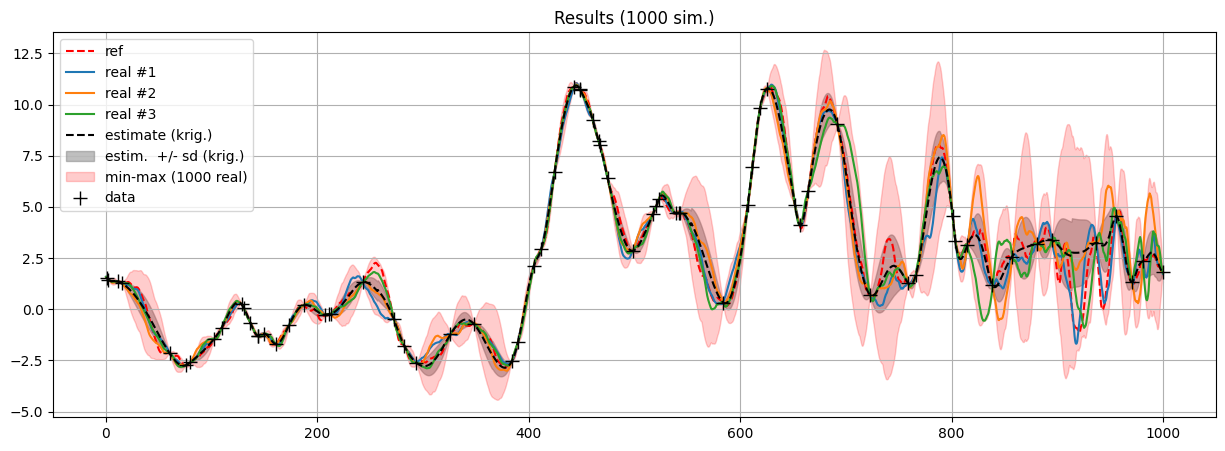
Sequential Gaussian Simulation (SGS), Sequential Indicator Simulation (SIS) and estimation (kriging) in a grid - based on (limited) search neigborhood; tools for image analysis : covariance variogram, connectivity of images (GEOSCLASSIC wrapper).
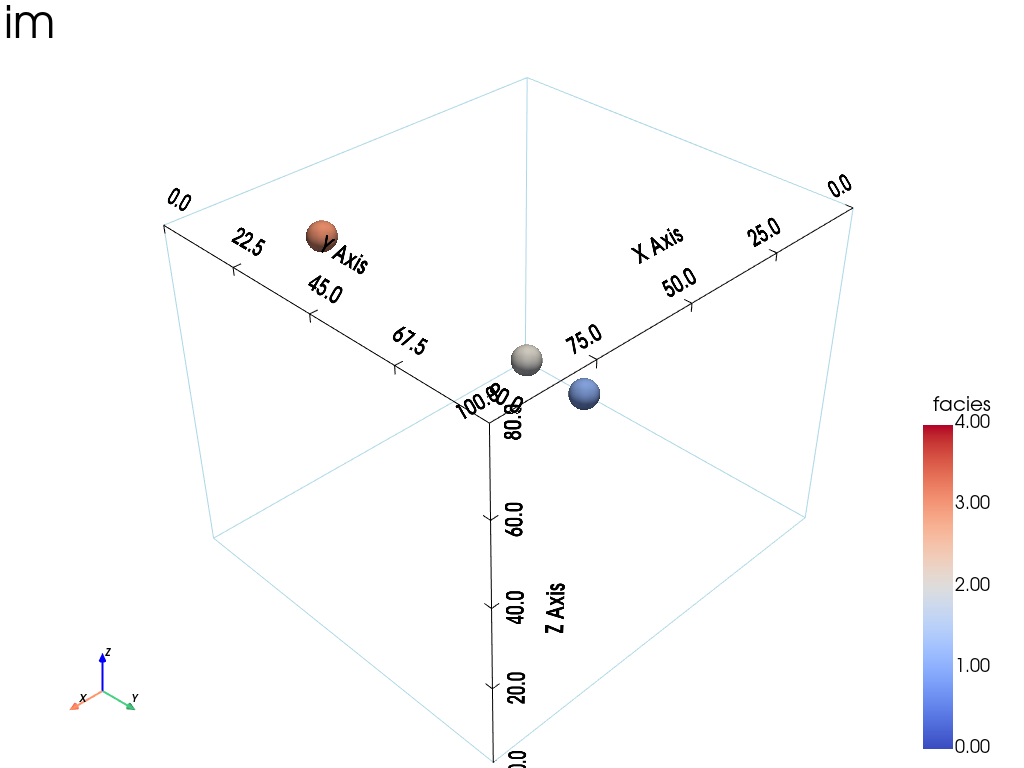
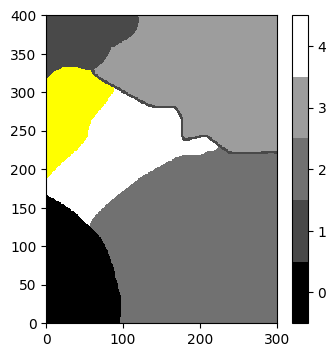
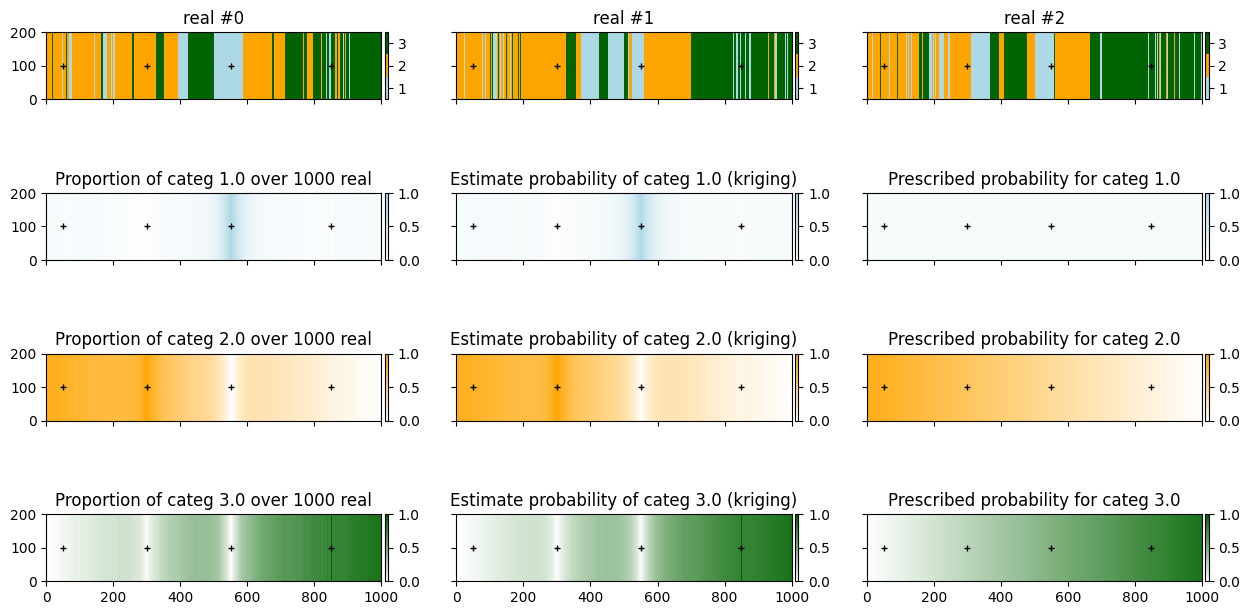
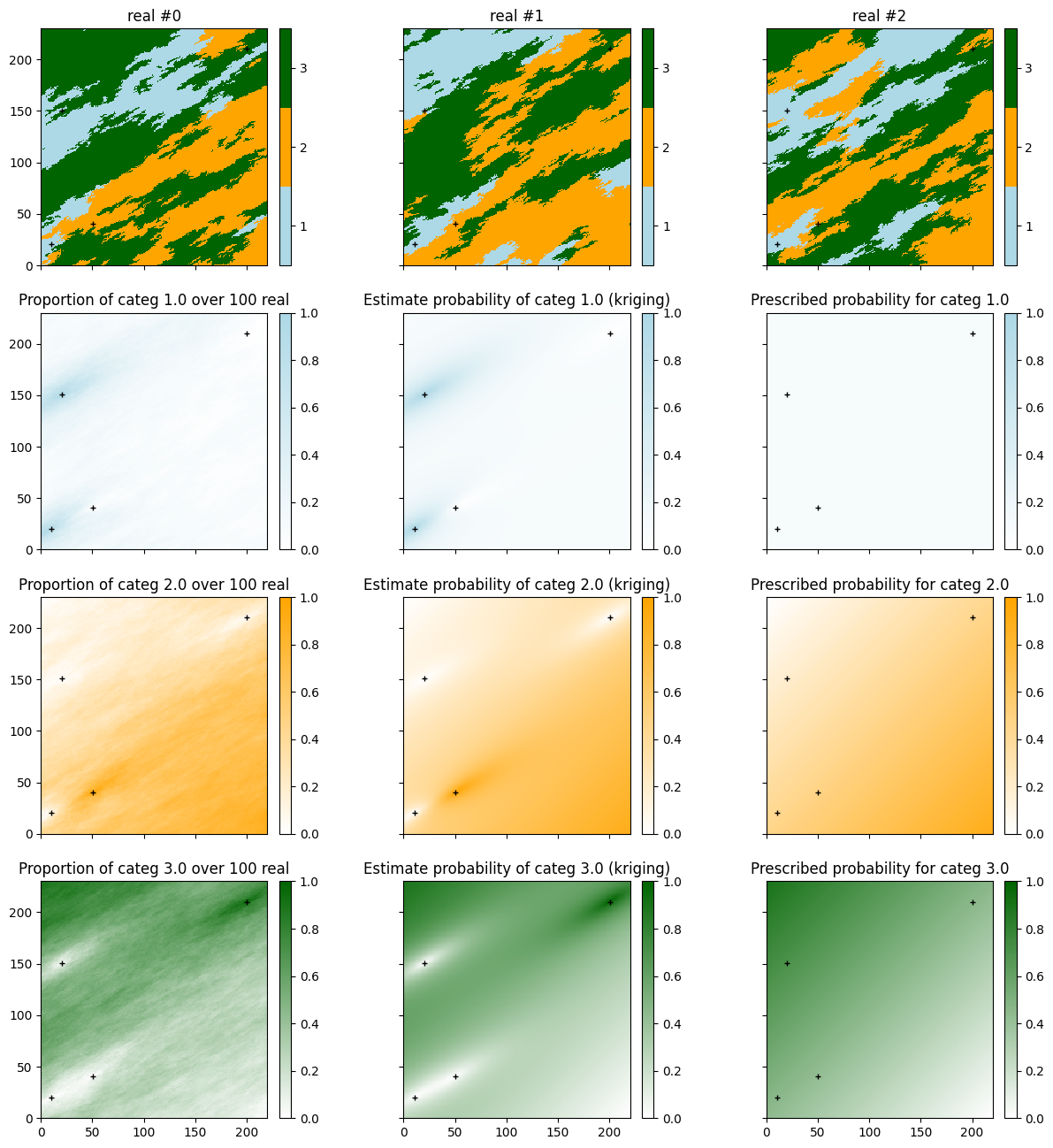
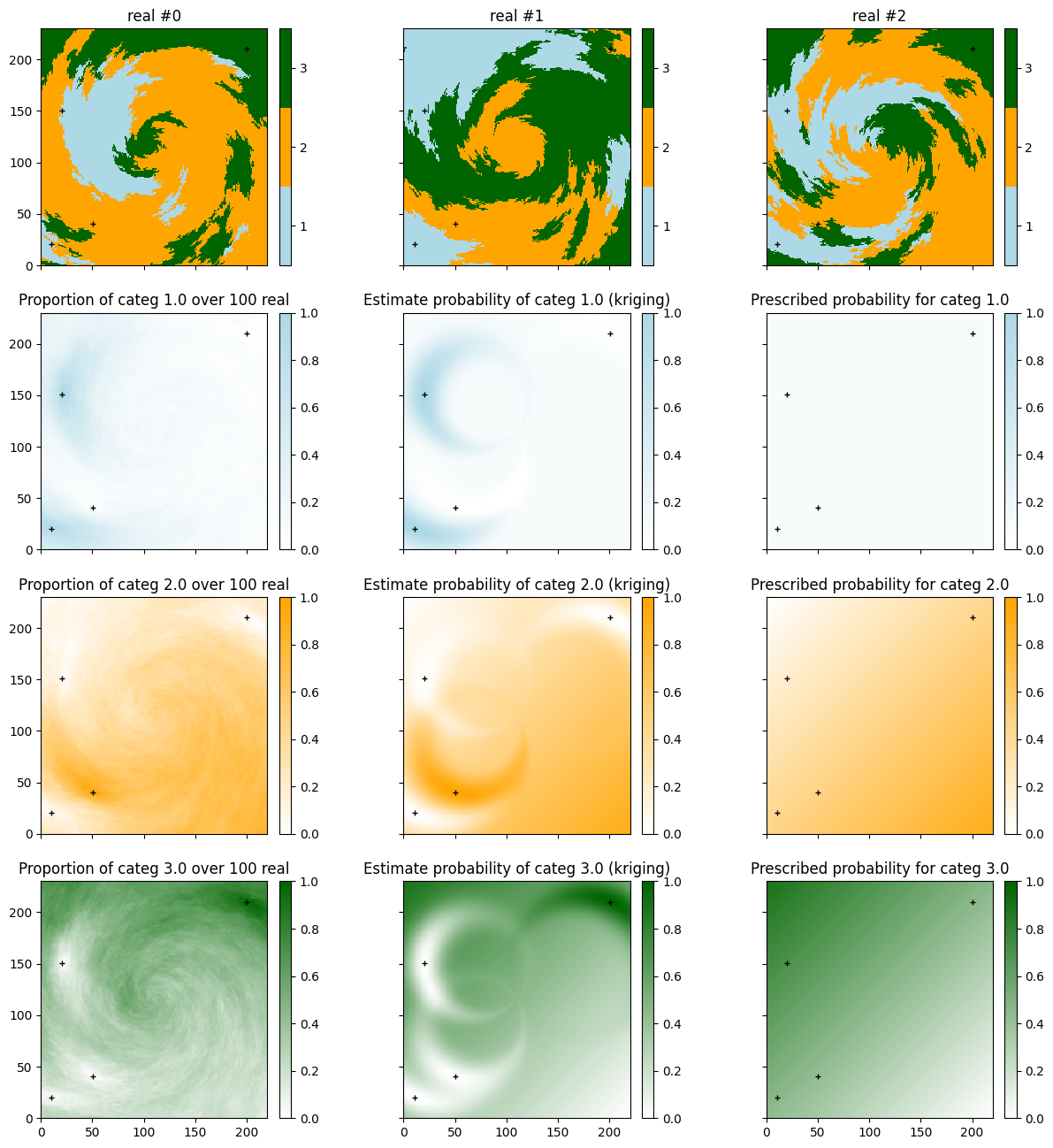
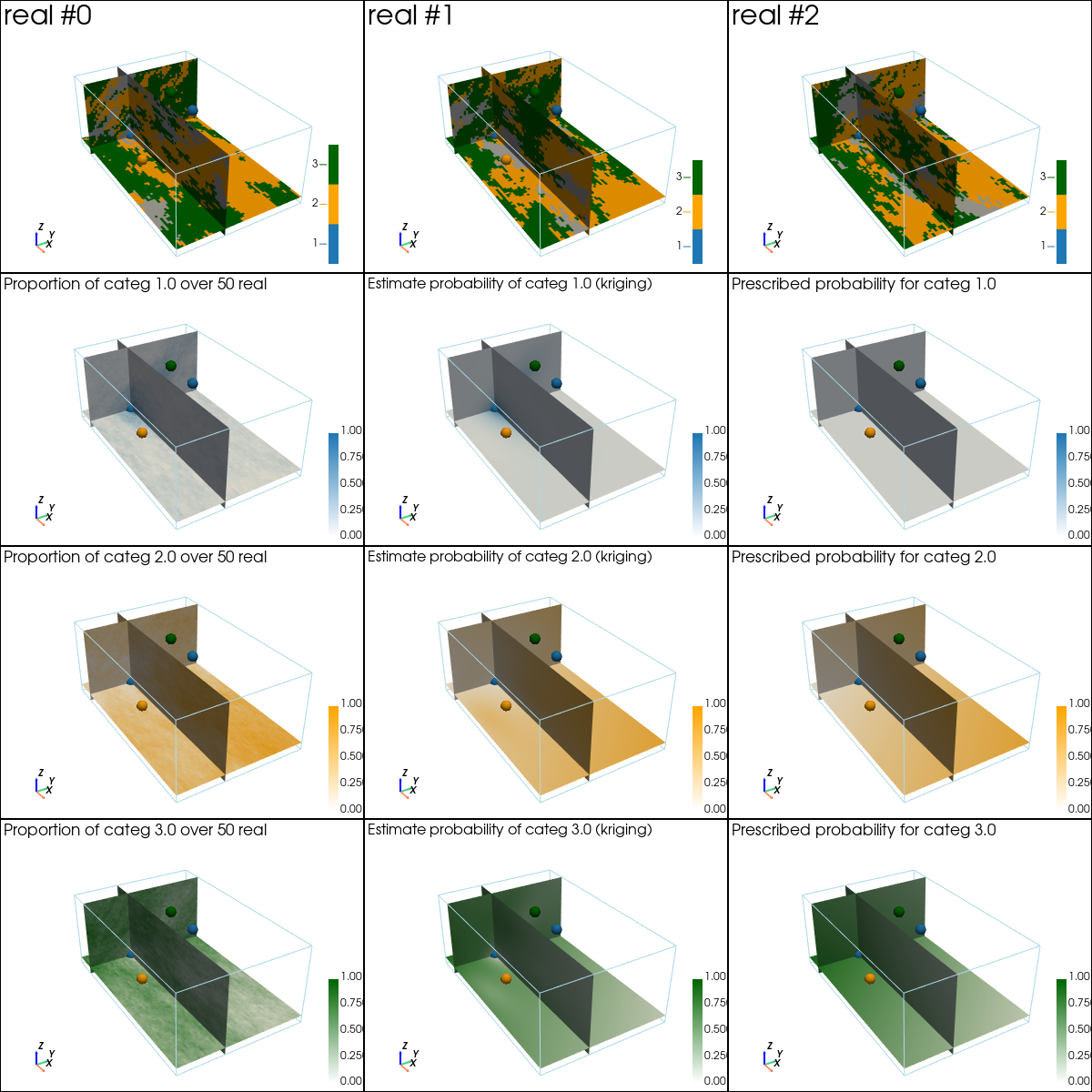
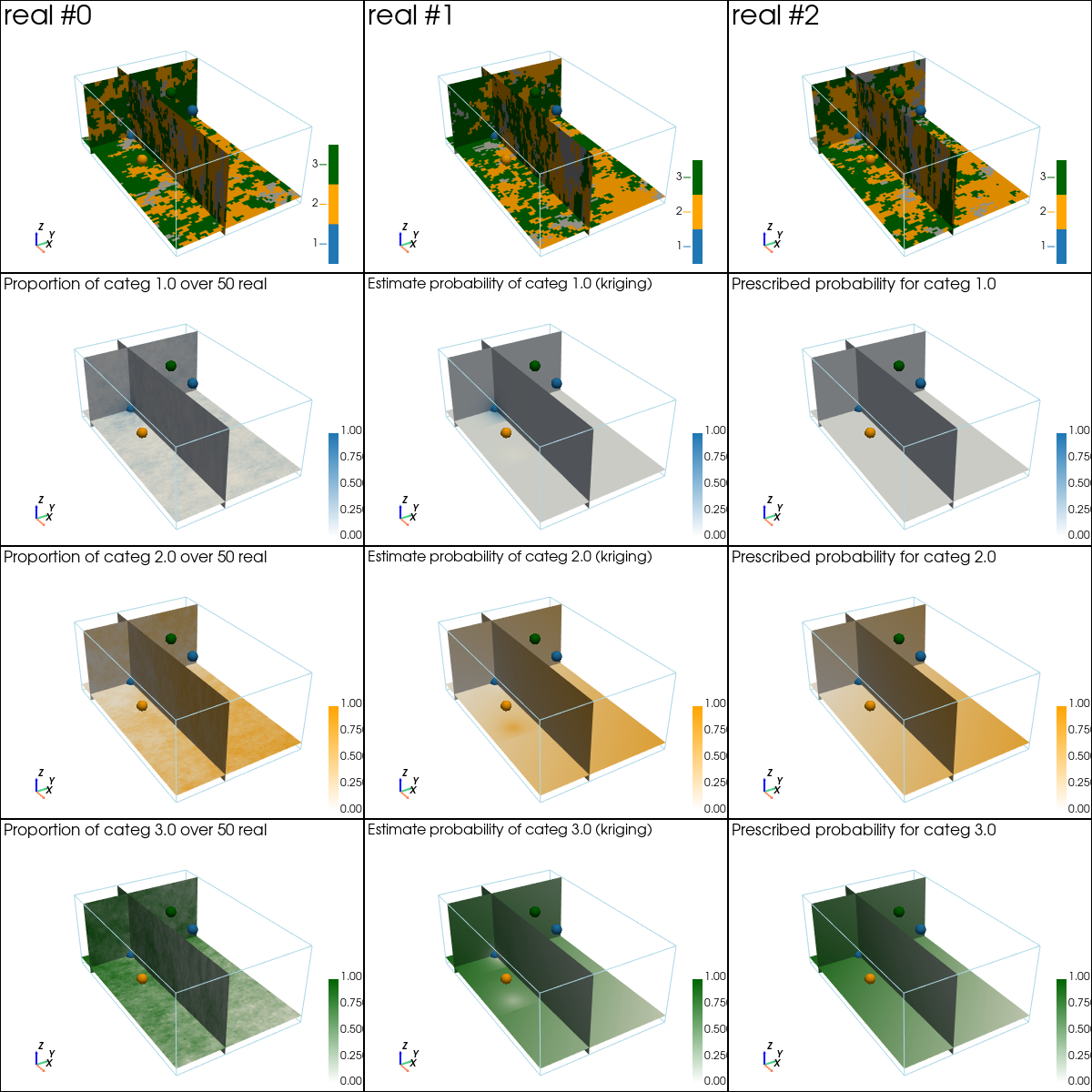
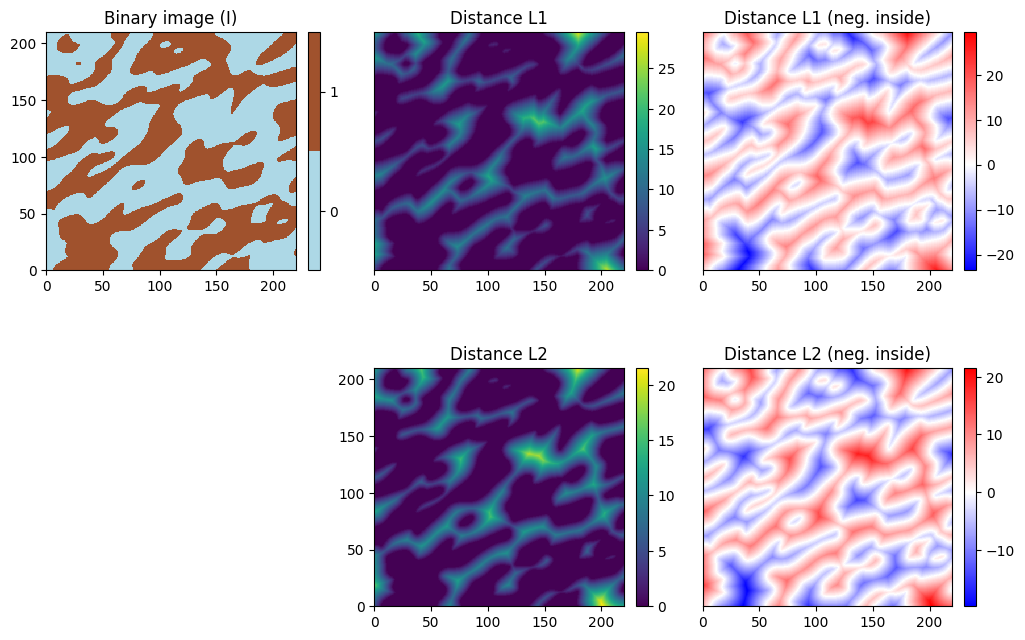
ex_gc_1d_1 - 1Dex_gc_1d_2 - 1D with non stationary covarianceex_gc_2d_1 - 2Dex_gc_2d_2 - 2D with non stationary covarianceex_gc_3d_1 - 3Dex_gc_3d_2 - 3D with non stationary covarianceex_gc_indicator_1d_1 - categorical variable (indicator) in 1Dex_gc_indicator_1d_2 - ind. var. 1D with non stationary covarianceex_gc_indicator_2d_1 - categorical variable (indicator) in 2Dex_gc_indicator_2d_2 - ind. var. 2D with non stationary covarianceex_gc_indicator_3d_1 - categorical variable (indicator) in 3Dex_gc_indicator_3d_2 - ind. var. 1D with non stationary covarianceex_gc_image_analysis - tools for image analysis
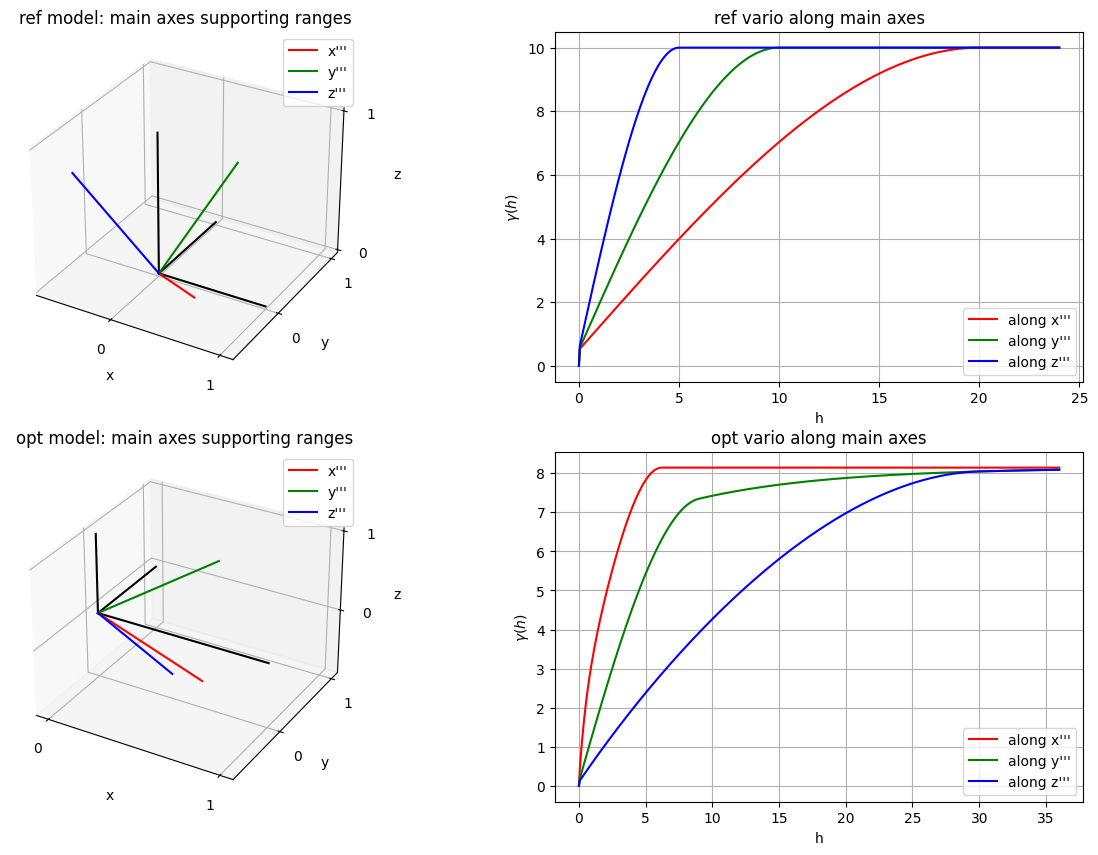
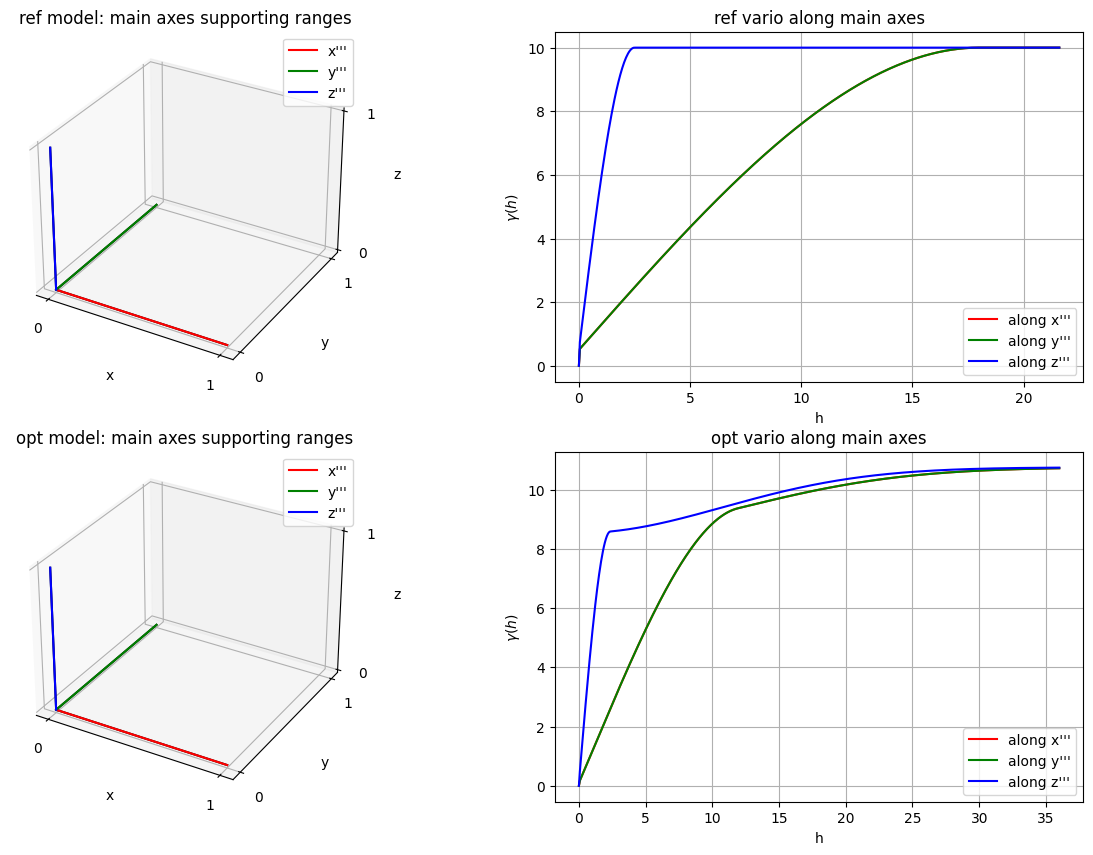
Variogram analysis tools
Tools for variogram analysis - variogram fitting - illustrated in various cases.
ex_VA_data1D_1 - 1Dex_VA_data1D_2 - 1D with non-stationarityex_VA_data2D_1 - 2D omni-directionalex_VA_data2D_2 - 2D with anisotropyex_VA_data2D_3 - 2D with non-stationarityex_VA_data3D_1 - 3D omni-directionalex_VA_data3D_2 - 3D with anisotropyex_VA_data3D_3 - 3D omni horizonally onlyex_VA_data3D_4 - 3D with non-stationarity

Pluri-Gaussian simulation (PGS)
Substitution Random Function (SRF)
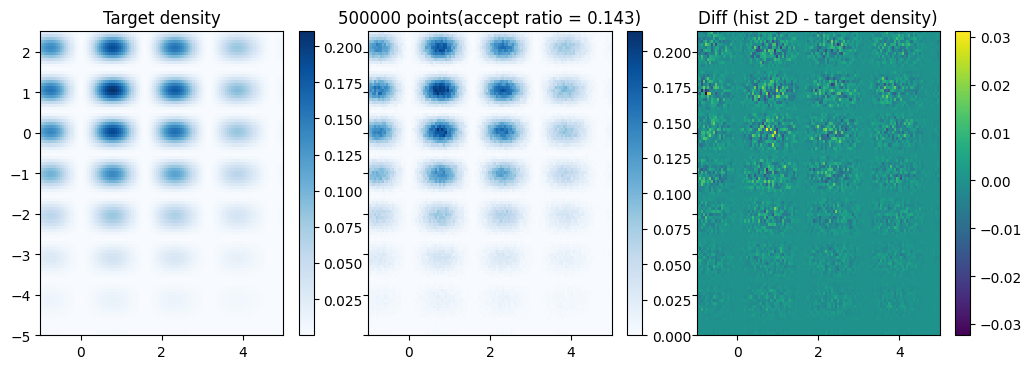
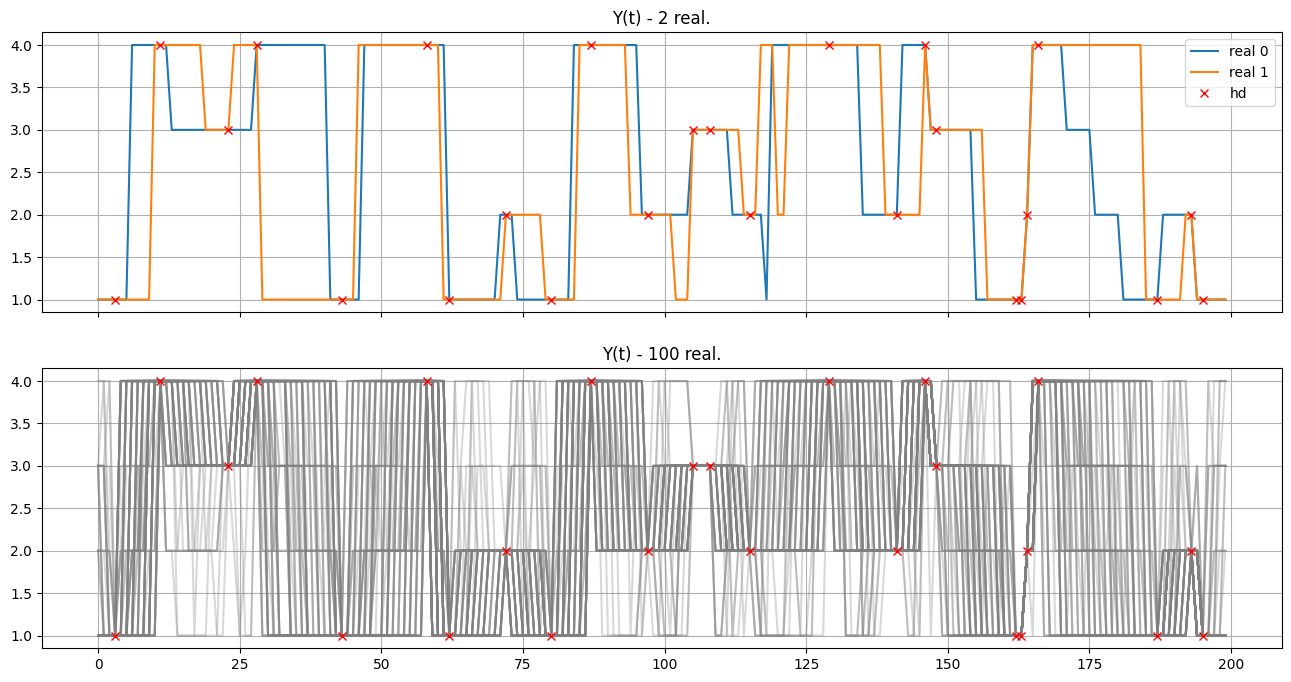
Miscellaneous algorithms based on random processes
Other algorithms based on random processes such accept-reject sampler, Markov chain on finite set, homogeneous and non-homogeneous Poisson point process, Chentsov simulations.
Logging
Some functions of GEONE allow for logging, based on the standard package logging.