GEONE - DEESSE - Simulations with geometrical transformations
Main points addressed
deesse simulation with rotation and/or scaling: local or global / with or without tolerance (uncertainty)
Import what is required
[1]:
import numpy as np
import matplotlib.pyplot as plt
import time
import os
# import package 'geone'
import geone as gn
[2]:
# Show version of python and version of geone
import sys
print(sys.version_info)
print('geone version: ' + gn.__version__)
sys.version_info(major=3, minor=13, micro=7, releaselevel='final', serial=0)
geone version: 1.3.0
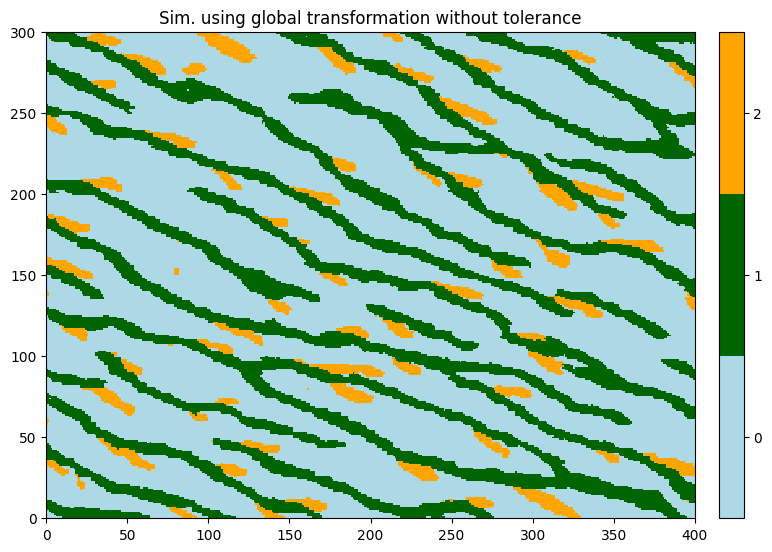
1. Global transformation - fixed values (without tolerance)
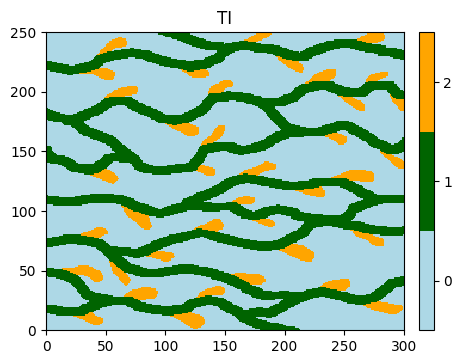
Training image (TI)
[3]:
# Read file
data_dir = 'data'
filename = os.path.join(data_dir, 'ti.txt')
ti = gn.img.readImageTxt(filename)
# Values in the TI
ti.get_unique()
[3]:
array([0., 1., 2.])
[4]:
# Setting for categories / colors
categ_val = [0, 1, 2]
categ_col = ['lightblue', 'darkgreen', 'orange']
plt.figure(figsize=(5,5))
gn.imgplot.drawImage2D(ti, categ=True, categVal=categ_val, categCol=categ_col, title='TI')
plt.show()
Simulation grid
Define the simulation grid (number of cells in each direction, cell unit, origin).
[5]:
nx, ny, nz = 400, 300, 1 # number of cells
sx, sy, sz = ti.sx, ti.sy, ti.sz # cell unit
ox, oy, oz = 0.0, 0.0, 0.0 # origin (corner of the "first" grid cell)
Fill the input structure for deesse and launch deesse
Specify homothety (scaling) and rotation.
Note: in presence of both transformations the structures obtained in output are the structures of the TI that have been rescaled first and then rotated.
[6]:
nreal = 1
deesse_input = gn.deesseinterface.DeesseInput(
nx=nx, ny=ny, nz=nz,
sx=sx, sy=sy, sz=sz,
ox=ox, oy=oy, oz=oz,
nv=1, varname='code',
TI=ti,
homothetyUsage=1, # use homothety (scaling) without tolerance
homothetyXLocal=False, # along x: global homothety
homothetyXRatio=1.33, # along x: value for scaling factor
homothetyYLocal=False, # along y: global homothety
homothetyYRatio=0.75, # along y: value for scaling factor
rotationUsage=1, # use rotation without tolerance
rotationAzimuthLocal=False, # rotation according to azimuth: global
rotationAzimuth=20., # rotation azimuth: value
distanceType='categorical',
nneighboringNode=24,
distanceThreshold=0.02,
maxScanFraction=0.25,
npostProcessingPathMax=1,
seed=444,
nrealization=nreal)
# Run deesse
t1 = time.time() # start time
deesse_output = gn.deesseinterface.deesseRun(deesse_input)
t2 = time.time() # end time
print(f'Elapsed time: {t2-t1:.2g} sec')
deesseRun: DeeSse running... [VERSION 3.2 / BUILD NUMBER 20230914 / OpenMP 19 thread(s)]
deesseRun: DeeSse run complete
Elapsed time: 2 sec
Retrieve the results (and display)
[7]:
# Retrieve the realization
sim = deesse_output['sim']
# Display
plt.figure(figsize=(9,9))
gn.imgplot.drawImage2D(sim[0], categ=True, categVal=categ_val, categCol=categ_col,
title='Sim. using global transformation without tolerance')
plt.show()
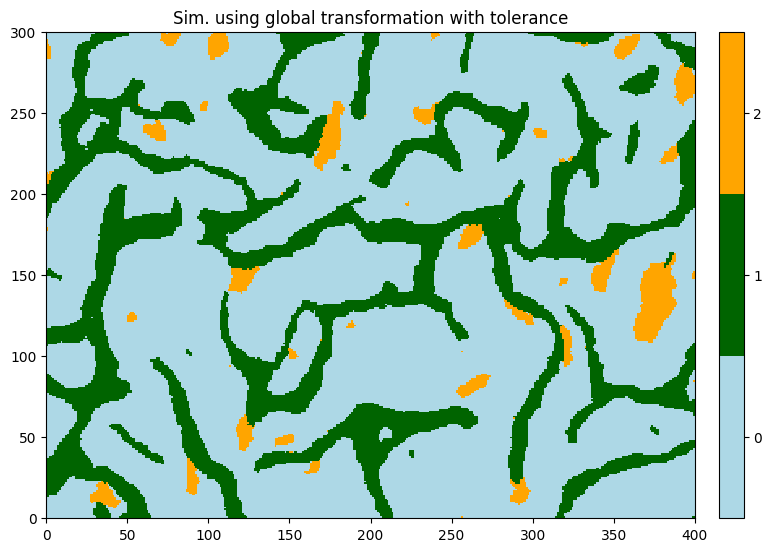
2. Global transformations - with tolerance
One can specify a range of value for the geometrical transformations.
[8]:
deesse_input = gn.deesseinterface.DeesseInput(
nx=nx, ny=ny, nz=nz,
sx=sx, sy=sy, sz=sz,
ox=ox, oy=oy, oz=oz,
nv=1, varname='code',
TI=ti,
homothetyUsage=2, # use homothety (scaling) with tolerance
homothetyXLocal=False, # along x: global homothety
homothetyXRatio=[0.5, 2.], # along x: min and max values for scaling factor
homothetyYLocal=False, # along y: global homothety
homothetyYRatio=[0.5, 2.], # along y: min and max values for scaling factor
rotationUsage=2, # use rotation with tolerance
rotationAzimuthLocal=False, # rotation according to azimuth: global
rotationAzimuth=[0., 180.], # rotation azimuth: min and max values
distanceType='categorical',
nneighboringNode=24,
distanceThreshold=0.02,
maxScanFraction=0.25,
npostProcessingPathMax=1,
seed=444,
nrealization=nreal)
# Run deesse
t1 = time.time() # start time
deesse_output = gn.deesseinterface.deesseRun(deesse_input)
t2 = time.time() # end time
print(f'Elapsed time: {t2-t1:.2g} sec')
deesseRun: DeeSse running... [VERSION 3.2 / BUILD NUMBER 20230914 / OpenMP 19 thread(s)]
deesseRun: DeeSse run complete
Elapsed time: 3.3 sec
[9]:
# Retrieve the realization
sim = deesse_output['sim']
# Display
plt.figure(figsize=(9,9))
gn.imgplot.drawImage2D(sim[0], categ=True, categVal=categ_val, categCol=categ_col,
title='Sim. using global transformation with tolerance')
plt.show()
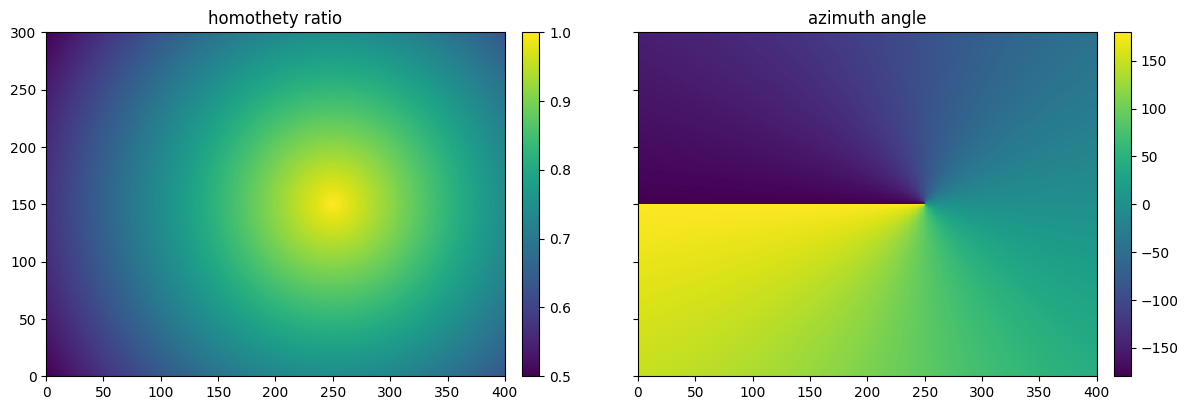
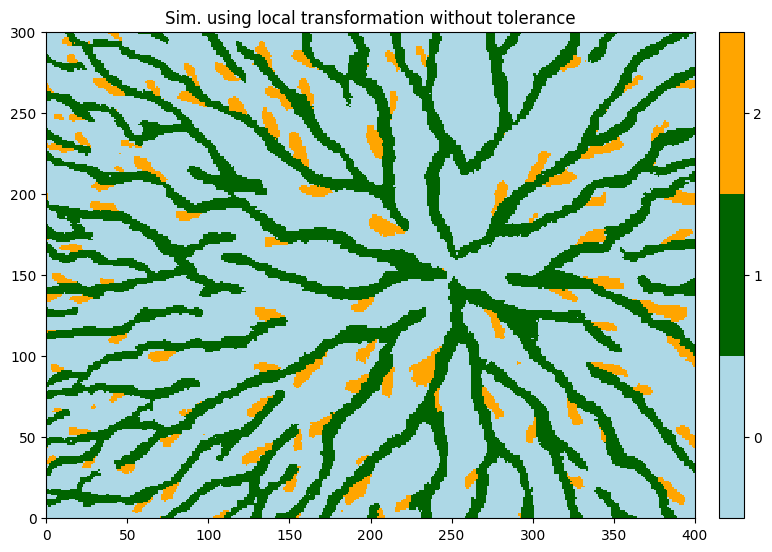
3. Local transformations - fixed values (without tolerance)
Build a map for homothety ratio and azimuth angle
Below, a piece of python code to build:
scaling: (nz,ny,nx)-array containing homothety ratio values on the simulation gridangle: (nz,ny,nx)-array containing angle values on the simulation grid
[10]:
# Set an image with simulation grid geometry defined above, and no variable
im = gn.img.Img(nx, ny, nz, sx, sy, sz, ox, oy, oz, nv=0)
# Get the x and y coordinates of the centers of grid cell (meshgrid)
xx = im.xx()[0]
yy = im.yy()[0]
# Equivalent:
## xg, yg: coordinates of the centers of grid cell
#xg = ox + 0.5*sx + sx*np.arange(nx)
#yg = oy + 0.5*sy + sy*np.arange(ny)
#xx, yy = np.meshgrid(xg, yg) # create meshgrid from the center of grid cells
# Set some parameters to build the variables scaling and angle
center_x, center_y = 250, 150
scaling_start, scaling_end = 1., 0.5
# Set scaling values over the grid
scaling = np.sqrt((xx-center_x)**2 + (yy-center_y)**2)
scaling_min = np.min(scaling)
scaling_max = np.max(scaling)
scaling = scaling_start + (scaling - scaling_min)/(scaling_max - scaling_min) * (scaling_end - scaling_start)
# Set angle values over the grid
angle = -np.arctan2(yy-center_y, xx-center_x)*180./np.pi
# Reshape (not necessary)
scaling = scaling.reshape(nz, ny, nx)
angle = angle.reshape(nz, ny, nx)
Display homothety ratio map and azimuth map
[11]:
# Set variable scaling and angle in image im
im.append_var([scaling, angle], varname=['scaling', 'angle'])
# Display
plt.subplots(1,2, figsize=(14,7), sharey=True) # 1 x 2 sub-plots
plt.subplot(1,2,1)
gn.imgplot.drawImage2D(im, iv=0, title='homothety ratio')
plt.subplot(1,2,2)
gn.imgplot.drawImage2D(im, iv=1, title='azimuth angle')
plt.show()
Fill the input structure for deesse and launch deesse
[12]:
deesse_input = gn.deesseinterface.DeesseInput(
nx=nx, ny=ny, nz=nz,
sx=sx, sy=sy, sz=sz,
ox=ox, oy=oy, oz=oz,
nv=1, varname='code',
TI=ti,
homothetyUsage=1, # use homothety (scaling) without tolerance
homothetyXLocal=True, # along x: local homothety
homothetyXRatio=scaling, # along x: map of values for scaling factor
homothetyYLocal=True, # along y: local homothety
homothetyYRatio=scaling, # along y: map of values for scaling factor
rotationUsage=1, # use rotation without tolerance
rotationAzimuthLocal=True, # rotation according to azimuth: local
rotationAzimuth=angle, # rotation azimuth: map of values
distanceType='categorical',
nneighboringNode=24,
distanceThreshold=0.02,
maxScanFraction=0.25,
npostProcessingPathMax=1,
seed=444,
nrealization=nreal)
# Run deesse
t1 = time.time() # start time
deesse_output = gn.deesseinterface.deesseRun(deesse_input)
t2 = time.time() # end time
print(f'Elapsed time: {t2-t1:.2g} sec')
deesseRun: DeeSse running... [VERSION 3.2 / BUILD NUMBER 20230914 / OpenMP 19 thread(s)]
deesseRun: DeeSse run complete
Elapsed time: 2.5 sec
[13]:
# Retrieve the realization
sim = deesse_output['sim']
# Display
plt.figure(figsize=(9,9))
gn.imgplot.drawImage2D(sim[0], categ=True, categVal=categ_val, categCol=categ_col,
title='Sim. using local transformation without tolerance')
plt.show()
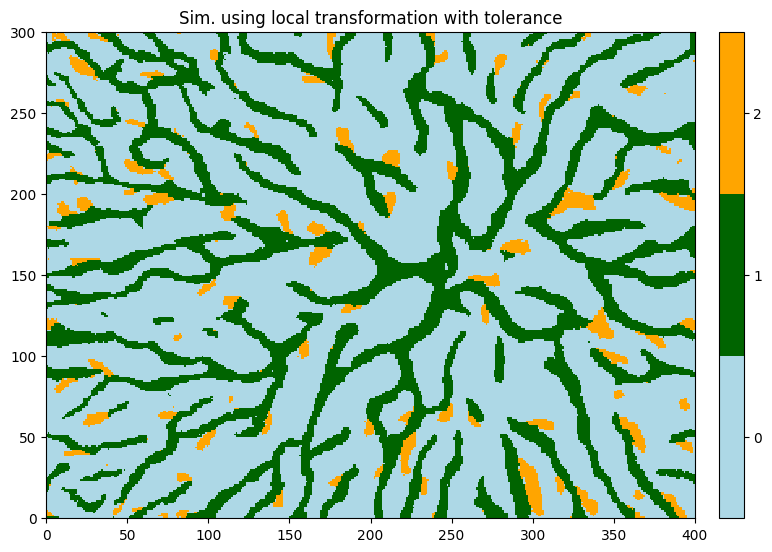
4. Local transformations - with tolerance
The minimal and maximal values (range) for the considered transformation must be given at each cell of the simulation grid:
scaling_min_max: (2,nz,ny,nx)-array containing homothety min and max ratio values on the simulation gridangle_min_max: (2,nz,ny,nx)-array containing min and max angle values on the simulation grid
[14]:
scaling_tol = 0.3
scaling_min_max = np.array((scaling-scaling_tol, scaling+scaling_tol))
angle_tol = 45.
angle_min_max = np.array((angle-angle_tol, angle+angle_tol))
deesse_input = gn.deesseinterface.DeesseInput(
nx=nx, ny=ny, nz=nz,
sx=sx, sy=sy, sz=sz,
ox=ox, oy=oy, oz=oz,
nv=1, varname='code',
TI=ti,
homothetyUsage=2, # use homothety (scaling) with tolerance
homothetyXLocal=True, # along x: local homothety
homothetyXRatio=scaling_min_max, # along x: map of min and max values for scaling factor
homothetyYLocal=True, # along y: local homothety
homothetyYRatio=scaling_min_max, # along y: map of min and max values for scaling factor
rotationUsage=2, # use rotation with tolerance
rotationAzimuthLocal=True, # rotation according to azimuth: local
rotationAzimuth=angle_min_max, # rotation azimuth: map of min and max values
distanceType='categorical',
nneighboringNode=24,
distanceThreshold=0.02,
maxScanFraction=0.25,
npostProcessingPathMax=1,
seed=444,
nrealization=nreal)
# Run deesse
t1 = time.time() # start time
deesse_output = gn.deesseinterface.deesseRun(deesse_input)
t2 = time.time() # end time
print(f'Elapsed time: {t2-t1:.2g} sec')
deesseRun: DeeSse running... [VERSION 3.2 / BUILD NUMBER 20230914 / OpenMP 19 thread(s)]
deesseRun: DeeSse run complete
Elapsed time: 4.9 sec
[15]:
# Retrieve the realization
sim = deesse_output['sim']
# Display
plt.figure(figsize=(9,9))
gn.imgplot.drawImage2D(sim[0], categ=True, categVal=categ_val, categCol=categ_col,
title='Sim. using local transformation with tolerance')
plt.show()
Remark
Note that, working with local transformation or transformation with tolerance, it can be helpful to limit the size of the search ellipsoid, in order to find similar patterns in the training image during the simulation.