GEONE - GEOSCLASSIC - categorical variable - non-stationary covariance model
Estimation (kriging) and simulation (Sequential Indicator Simulation, SIS)
See notebook ex_geosclassic_indicator_1d_1.ipynb for detail explanations about estimation (kriging) and simulation (Sequential Indicator Simulation, SIS) in a grid - using stationary covariance model.
Non-stationary covariance model over a grid
See notebook ex_geosclassic_1d_2_non_stat_cov.ipynb for detail explanations on how to set non-stationarities in a grid.
Examples in 1D
In this notebook, examples in 1D with a non-stationary covariance model are given.
Import what is required
[1]:
import numpy as np
import matplotlib.pyplot as plt
import time
# import package 'geone'
import geone as gn
[2]:
# Show version of python and version of geone
import sys
print(sys.version_info)
print('geone version: ' + gn.__version__)
sys.version_info(major=3, minor=13, micro=7, releaselevel='final', serial=0)
geone version: 1.3.1
Remark
The matplotlib figures can be visualized in interactive mode:
%matplotlib notebook: enable interactive mode%matplotlib inline: disable interactive mode
Category values
A list of category values (facies) must be defined. Let ncategory be the length of this list, i.e. the number of categories:
if
ncategory == 1: the unique category value given must not be equal to 0; this is used for a binary case with values (“unique category value”, 0), where 0 indicates the absence of the considered medium; conditioning data values should be “unique category value” or 0if
ncategory >= 2: this is used for a multi-category case with given values (distinct); conditioning data values should be in the list of given values
Then, set color for each category, and color maps for proportions (for further plots).
Below: select the case with ``ncategory`` greater than one or equal to one below, comment the undesired cell.
[3]:
# Case with ncategory > 1
# -----------------------
category_values = [1., 2., 3.]
ncategory = len(category_values)
# Set colors ...
categVal = category_values
categCol = ['lightblue', 'orange', 'darkgreen'] # must be of length len(categVal)
cmap_categ = [gn.customcolors.custom_cmap(['white', c]) for c in categCol]
[4]:
# # Case with ncategory = 1
# # -----------------------
# category_values = [2.] # all categories are 2. and 0.
# ncategory = len(category_values)
# # Set colors ...
# categVal = [category_values[0], 0]
# categCol = ['tab:red', 'lightblue'] # must be of length len(categVal)
# cmap_categ = [gn.customcolors.custom_cmap(['white', c]) for c in categCol]
Grid (1D)
[5]:
nx = 1000 # number of cells
sx = 1.0 # cell unit
ox = 0.0 # origin
Covariance model
In 1D, a covariance model is given by an instance of the class geone.covModel.covModel1D.
Base covariance model (sationary)
The weight 'w' to every elementary contribution is set to 1.0; the method multiply_w will be used to set non-stationarities about this parameter.
[6]:
# Define the base covariance model (stationary)
cov_model = gn.covModel.CovModel1D(elem=[
('exponential', {'w':1.0, 'r':100}), # elementary contribution
('nugget', {'w':1.0}), # elementary contribution
], name='model-1D example')
[7]:
# plt.figure()
# cov_model.plot_model()
# plt.title('Covariance function - base')
# plt.show()
Defining non-stationarities
[8]:
# Set an image with grid geometry defined above, and no variable
im = gn.img.Img(nx, 1, 1, sx, 1.0, 1.0, ox, 0.0, 0.0, nv=0)
# Get the x coordinates of the centers of grid cell
x_grid = im.x()
# Coordinate of center of the grid
x_center = 0.5 * (im.xmin() + im.xmax())
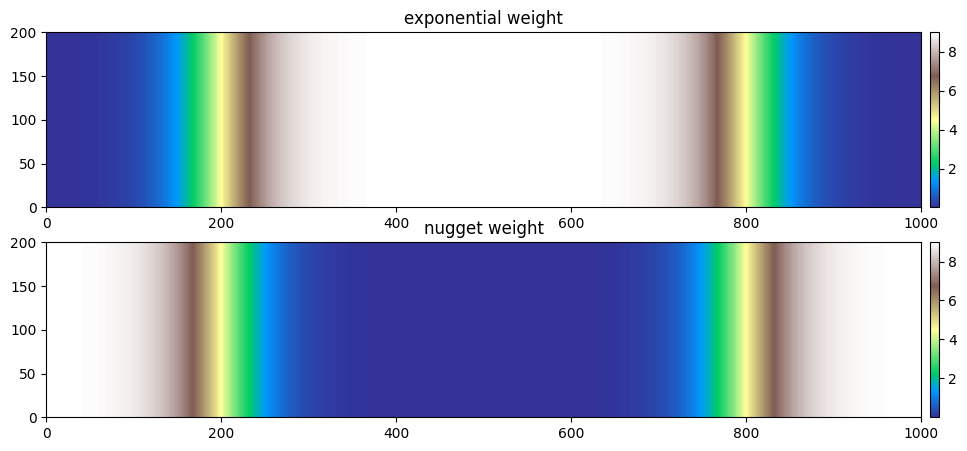
# Set weight over the grid for the elementary contributions of the covariance model (array)
nug_w = 9. * 1. / (1. + np.exp(-(np.abs(x_grid-x_center)-300)/30))
exp_w = 9 - nug_w
# Set list to handle non-stationarities for further estimation/simulation in the grid
cov_model_non_stationarity_list = [
('multiply_w', exp_w, {'elem_ind':0}), # multiply weight by `gau_w` for elem. contrib. of index 0
('multiply_w', nug_w, {'elem_ind':1}), # multiply weight by `nug_w` for elem. contrib. of index 1
]
# Note: `gau_w`, `nug_w` could also be a function of one parameter (x location)
[9]:
# Plot
# ----
# Set weight in images ...
im_exp_w = gn.img.Img(nx, 1, 1, sx, 1., 1., ox, 0., 0., nv=1, val=exp_w)
im_nug_w = gn.img.Img(nx, 1, 1, sx, 1., 1., ox, 0., 0., nv=1, val=nug_w)
# Set spacing in y direction (1 cell) to visualize images using gn.imgplot.drawImage2D
im_exp_w.sy = .2 * im_exp_w.sx * im_exp_w.nx
im_nug_w.sy = .2 * im_nug_w.sx * im_nug_w.nx
# Plot
plt.subplots(2,1, figsize=(12,5), sharey=True)
plt.subplot(2,1,1)
gn.imgplot.drawImage2D(im_exp_w, cmap='terrain', title="exponential weight")
plt.subplot(2,1,2)
gn.imgplot.drawImage2D(im_nug_w, cmap='terrain', title="nugget weight")
plt.show()
Settings - using data (optional) and probability (constant, optional)
[10]:
if ncategory > 1:
# Case with ncategory > 1
# -----------------------
# Data
x = [50.5, 300.1, 550.2, 849.4] # data locations (real coordinates)
v = [ 1., 2., 1., 3.] # data values
# x = None
# v = None
# Probability, proportion of each category
probability = [.1, .2, .7] # should sum to 1
# probability = None
# Type of kriging
method = 'simple_kriging'
else:
# Case with ncategory = 1
# -----------------------
# Data
x = [50.5, 300.1, 550.2, 849.4] # data locations (real coordinates)
v = [ 0., 2., 2., 0.] # data values
# x = None
# v = None
# Probability, proportion (of non-zero category)
probability = [.7] # list of one number in the interval [0, 1]
# probability = None
# Type of kriging
method = 'simple_kriging'
Estimation of probabilities (by kriging)
[11]:
# Computational resources
nthreads = 8
t1 = time.time() # start time
geosclassic_output = gn.geosclassicinterface.estimateIndicator(
category_values, # list of categories (required)
cov_model, # covariance model(s) (required)
nx, sx, ox, # grid geometry (nx is required)
x=x, v=v, # data
probability=probability, # probability
cov_model_non_stationarity_list=cov_model_non_stationarity_list, # non-stationrities
method=method, # type of kriging
use_unique_neighborhood=False, # search neighborhood (unique cannot be used with non-stationarities)...
searchRadius=None,
searchRadiusRelative=1.2,
nneighborMax=12,
nthreads=nthreads, # computational resources
verbose=2 # verbose mode
)
t2 = time.time() # end time
print('Elapsed time: {:.2g} sec'.format(t2-t1))
krig_img = geosclassic_output['image'] # output image
estimateIndicator: call `run_MPDSOMPGeosClassicIndicatorSim` [1 process of 8 thread(s) (OpenMP)] ...
estimateIndicator: `run_MPDSOMPGeosClassicIndicatorSim` [1 process] complete
Elapsed time: 0.0031 sec
[12]:
# Total number of warning(s), and warning messages
geosclassic_output['nwarning'], geosclassic_output['warnings']
[12]:
(0, [])
[13]:
# %%script false --no-raise-error # skip this cell! (comment this line to run the cell)
# Equivalent, using other computational resources
# -----------------------------------------------
# Computational resources
nthreads = 1
t1 = time.time() # start time
geosclassic_output = gn.geosclassicinterface.estimateIndicator(
category_values, # list of categories (required)
cov_model, # covariance model(s) (required)
nx, sx, ox, # grid geometry (nx is required)
x=x, v=v, # data
probability=probability, # probability
cov_model_non_stationarity_list=cov_model_non_stationarity_list, # non-stationrities
method=method, # type of kriging
use_unique_neighborhood=False, # search neighborhood (unique cannot be used with non-stationarities)...
searchRadius=None,
searchRadiusRelative=1.2,
nneighborMax=12,
nthreads=nthreads, # computational resources
verbose=2 # verbose mode
)
t2 = time.time() # end time
print('Elapsed time: {:.2g} sec'.format(t2-t1))
krig_img_2 = geosclassic_output['image'] # output image
print(f"Same results ? {np.allclose(krig_img.val, krig_img_2.val)}")
estimateIndicator: call `run_MPDSOMPGeosClassicIndicatorSim` [1 process of 1 thread(s) (OpenMP)] ...
estimateIndicator: `run_MPDSOMPGeosClassicIndicatorSim` [1 process] complete
Elapsed time: 0.0049 sec
Same results ? True
Simulations
[14]:
# Number of realizations
nreal = 1000
# Seed
seed = 321
# Computational resources
nproc = 2
nthreads_per_proc = 4
t1 = time.time() # start time
geosclassic_output = gn.geosclassicinterface.simulateIndicator(
category_values, # list of categories (required)
cov_model, # covariance model(s) (required)
nx, sx, ox, # grid geometry (nx is required)
x=x, v=v, # data
probability=probability, # probability
cov_model_non_stationarity_list=cov_model_non_stationarity_list, # non-stationrities
method=method, # type of kriging
searchRadius=None, # search neighborhood ...
searchRadiusRelative=1.2,
nneighborMax=12,
nreal=nreal, # number of realizations
seed=seed, # seed
nproc=nproc, # computational resources ...
nthreads_per_proc=nthreads_per_proc,
verbose=2 # verbose mode
)
t2 = time.time() # end time
print('Elapsed time: {:.2g} sec'.format(t2-t1))
simul_img = geosclassic_output['image'] # output image
simulateIndicator: call `run_MPDSOMPGeosClassicIndicatorSim` [2 process(es) of 4 thread(s) (OpenMP)] ...
simulateIndicator: `run_MPDSOMPGeosClassicIndicatorSim` [2 process(es)] complete
Elapsed time: 2.9 sec
[15]:
# Total number of warning(s), and warning messages
geosclassic_output['nwarning'], geosclassic_output['warnings']
[15]:
(0, [])
[16]:
# %%script false --no-raise-error # skip this cell! (comment this line to run the cell)
# Equivalent, using other computational resources
# -----------------------------------------------
# Computational resources
nproc = 1
nthreads_per_proc = 1
t1 = time.time() # start time
geosclassic_output = gn.geosclassicinterface.simulateIndicator(
category_values, # list of categories (required)
cov_model, # covariance model(s) (required)
nx, sx, ox, # grid geometry (nx is required)
x=x, v=v, # data
probability=probability, # probability
cov_model_non_stationarity_list=cov_model_non_stationarity_list, # non-stationrities
method=method, # type of kriging
searchRadius=None, # search neighborhood ...
searchRadiusRelative=1.2,
nneighborMax=12,
nreal=nreal, # number of realizations
seed=seed, # seed
nproc=nproc, # computational resources ...
nthreads_per_proc=nthreads_per_proc,
verbose=2 # verbose mode
)
t2 = time.time() # end time
print('Elapsed time: {:.2g} sec'.format(t2-t1))
simul_img_2 = geosclassic_output['image'] # output image
print(f"Same results ? {np.allclose(simul_img.val, simul_img_2.val)}")
simulateIndicator: call `run_MPDSOMPGeosClassicIndicatorSim` [1 process of 1 thread(s) (OpenMP)] ...
simulateIndicator: `run_MPDSOMPGeosClassicIndicatorSim` [1 process] complete
Elapsed time: 14 sec
Same results ? True
Plot the results
[17]:
# Set sapcing (cell size) in y direction (1 cell in 1D) to visualize images using gn.imgplot.drawImage2D
sy = 0.2 * (simul_img.xmax() - simul_img.xmin())
simul_img.sy = sy
krig_img.sy = sy
if x is not None:
# Set y-coordinates for conditioning data points for visualization
y = len(x) * [simul_img.oy + 0.5*simul_img.sy]
[18]:
# Compute proportion of each category (pixel-wise)
simul_img_prop = gn.img.imageCategProp(simul_img, category_values)
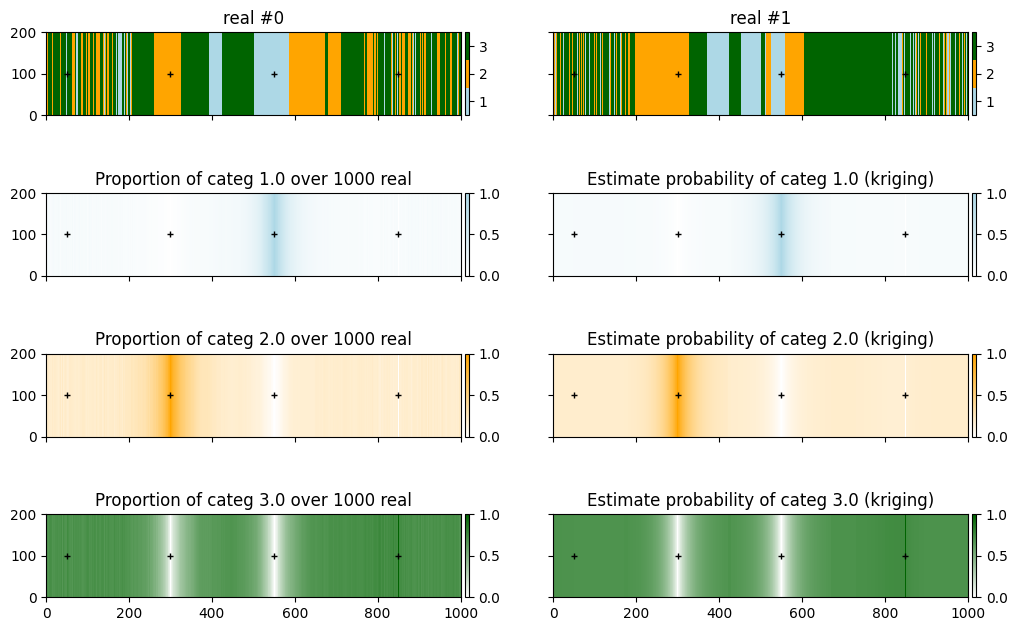
[19]:
# Plot
plt.subplots(1+ncategory, 2, figsize=(12, 2*(1+ncategory)), sharex=True, sharey=True)
for i in range(2):
plt.subplot(1+ncategory, 2, i+1)
gn.imgplot.drawImage2D(simul_img, iv=i, categ=True, categVal=categVal, categCol=categCol)
if x is not None:
plt.plot(x, y, '+', c='black', markersize=5) # add conditioning point locations
plt.title(f'real #{i}')
for i in range(ncategory):
plt.subplot(1+ncategory, 2, 2*i+3)
gn.imgplot.drawImage2D(simul_img_prop, iv=i, vmin=0, vmax=1, cmap=cmap_categ[i])
if x is not None:
plt.plot(x, y, '+', c='black', markersize=5) # add conditioning point locations
plt.title(f'Proportion of categ {categVal[i]} over {nreal} real')
plt.subplot(1+ncategory, 2, 2*i+4)
gn.imgplot.drawImage2D(krig_img, iv=i, vmin=0, vmax=1, cmap=cmap_categ[i])
if x is not None:
plt.plot(x, y, '+', c='black', markersize=5) # add conditioning point locations
plt.title(f'Estimate probability of categ {categVal[i]} (kriging)')
plt.show()
Check results
[20]:
# Check data
# ----------
if x is not None:
# Get index of conditioning location in the grid
data_grid_index = [gn.img.pointToGridIndex(xk, 0, 0, sx, 1., 1., ox, 0., 0.) for xk in x] # (ix, iy, iz) for each data point
# Check estimation
krig_v = [krig_img.val[:, iz, iy, ix] for ix, iy, iz in data_grid_index]
if ncategory == 1:
print(f'Estimation: all data respected ? {np.all(np.asarray(krig_v).reshape(-1) == np.asarray([1 if vi == category_values[0] else 0 for vi in v]))}')
else:
print(f'Estimation: all data respected ? {np.all([np.all(krig_v[i] == np.eye(ncategory)[np.where(np.asarray(category_values) == v[i])[0][0]]) for i in range(len(x))])}')
# Check simulation
sim_v = [simul_img.val[:, iz, iy, ix] for ix, iy, iz in data_grid_index]
print(f'Simulation: all data respected ? {np.all([np.all(sim_v[i] == v[i]) for i in range(len(x))])}')
Estimation: all data respected ? True
Simulation: all data respected ? True
[21]:
# Compare probabilities
# ---------------------
if probability is not None:
print(f'Prescribed probabilities = {probability}')
print(f'Estimation: probabilities (mean over the grid) = {krig_img.val.mean(axis=(1,2,3))}')
print(f'Simulation: probabilities (mean over the grid and all real.)= {[np.mean(simul_img.val == cv) for cv in category_values]}')
Prescribed probabilities = [0.1, 0.2, 0.7]
Estimation: probabilities (mean over the grid) = [0.15260573 0.23212455 0.61526972]
Simulation: probabilities (mean over the grid and all real.)= [np.float64(0.144588), np.float64(0.23767), np.float64(0.617742)]
2. Example - using non-stationary probabilities
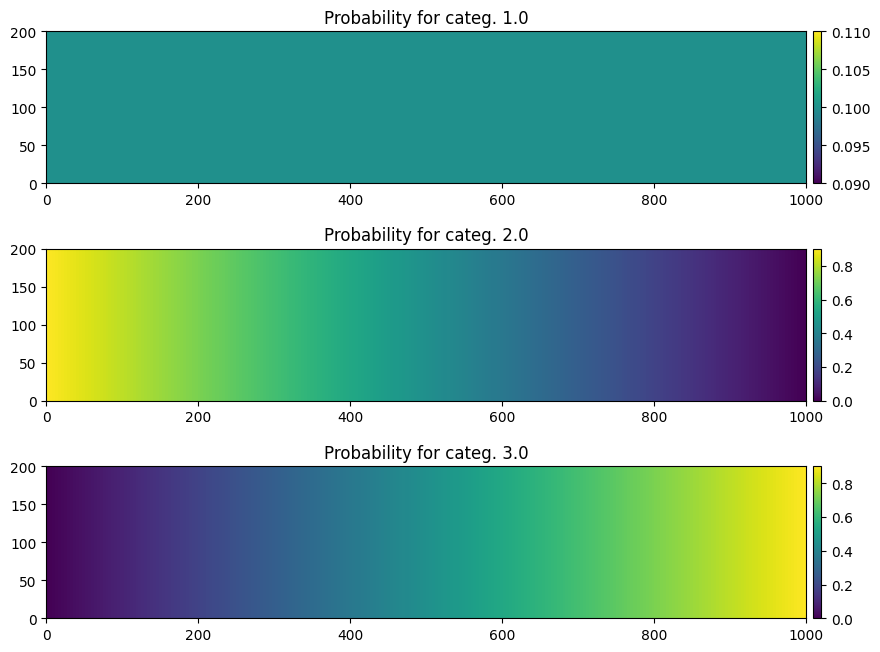
Setting probability (proportion) maps
[22]:
# Coordinates of the center of grid cells
xg = ox + sx*(0.5+np.arange(nx))
if ncategory > 1:
# Case with ncategory > 1
# -----------------------
# Define probability maps for each category
c = 0.9
p1 = np.linspace(c, 0., nx)
p2 = c - p1
p0 = (1. - c) * np.ones_like(p1) # 1.0 - p1 - p2 # constant map (0.1)
probability = np.array((p0, p1, p2))
else:
# Case with ncategory = 1
# -----------------------
c = 1.0
# Define probability map for non-zero category
probability = np.linspace(0., c, nx)
[23]:
# Plot
# ----
# Fill image for display
probability_img = gn.img.Img(nx, 1, 1, sx, 1., 1., 0., 0., 0., nv=ncategory, val=probability)
probability_img.sy = .2 * probability_img.sx * probability_img.nx # set spacing in y direction (1 cell) to visualize images using gn.imgplot.drawImage2D
# Display probability maps
plt.subplots(ncategory, 1, figsize=(10,8), sharey=True)
for i in range(ncategory):
plt.subplot(ncategory, 1, 1+i)
gn.imgplot.drawImage2D(probability_img, iv=i, title = f'Probability for categ. {categVal[i]}')
plt.show()
Settings - using data (optional)
[24]:
if ncategory > 1:
# Case with ncategory > 1
# -----------------------
# Data
x = [50.5, 300.1, 550.2, 849.4] # data locations (real coordinates)
v = [ 1., 2., 1., 3.] # data values
# x = None
# v = None
# Probability : `probability` defined above
# Type of kriging
method = 'simple_kriging'
else:
# Case with ncategory = 1
# -----------------------
# Data
x = [50.5, 300.1, 550.2, 849.4] # data locations (real coordinates)
v = [ 0., 2., 2., 0.] # data values
# x = None
# v = None
# Probability : `probability` defined above
# Type of kriging
method = 'simple_kriging'
Estimation of probabilities (by kriging)
[25]:
# Computational resources
nthreads = 8
t1 = time.time() # start time
geosclassic_output = gn.geosclassicinterface.estimateIndicator(
category_values, # list of categories (required)
cov_model, # covariance model(s) (required)
nx, sx, ox, # grid geometry (nx is required)
x=x, v=v, # data
probability=probability, # probability
cov_model_non_stationarity_list=cov_model_non_stationarity_list, # non-stationrities
method=method, # type of kriging
use_unique_neighborhood=False, # search neighborhood (unique cannot be used with non-stationarities)...
searchRadius=None,
searchRadiusRelative=1.2,
nneighborMax=12,
nthreads=nthreads, # computational resources
verbose=2 # verbose mode
)
t2 = time.time() # end time
print('Elapsed time: {:.2g} sec'.format(t2-t1))
krig_img = geosclassic_output['image'] # output image
estimateIndicator: call `run_MPDSOMPGeosClassicIndicatorSim` [1 process of 8 thread(s) (OpenMP)] ...
estimateIndicator: `run_MPDSOMPGeosClassicIndicatorSim` [1 process] complete
Elapsed time: 0.0027 sec
[26]:
# Total number of warning(s), and warning messages
geosclassic_output['nwarning'], geosclassic_output['warnings']
[26]:
(0, [])
[27]:
# %%script false --no-raise-error # skip this cell! (comment this line to run the cell)
# Equivalent, using other computational resources
# -----------------------------------------------
# Computational resources
nthreads = 1
t1 = time.time() # start time
geosclassic_output = gn.geosclassicinterface.estimateIndicator(
category_values, # list of categories (required)
cov_model, # covariance model(s) (required)
nx, sx, ox, # grid geometry (nx is required)
x=x, v=v, # data
probability=probability, # probability
cov_model_non_stationarity_list=cov_model_non_stationarity_list, # non-stationrities
method=method, # type of kriging
use_unique_neighborhood=False, # search neighborhood (unique cannot be used with non-stationarities)...
searchRadius=None,
searchRadiusRelative=1.2,
nneighborMax=12,
nthreads=nthreads, # computational resources
verbose=2 # verbose mode
)
t2 = time.time() # end time
print('Elapsed time: {:.2g} sec'.format(t2-t1))
krig_img_2 = geosclassic_output['image'] # output image
print(f"Same results ? {np.allclose(krig_img.val, krig_img_2.val)}")
estimateIndicator: call `run_MPDSOMPGeosClassicIndicatorSim` [1 process of 1 thread(s) (OpenMP)] ...
estimateIndicator: `run_MPDSOMPGeosClassicIndicatorSim` [1 process] complete
Elapsed time: 0.0089 sec
Same results ? True
Simulations
[28]:
# Number of realizations
nreal = 1000
# Seed
seed = 321
# Computational resources
nproc = 2
nthreads_per_proc = 4
t1 = time.time() # start time
geosclassic_output = gn.geosclassicinterface.simulateIndicator(
category_values, # list of categories (required)
cov_model, # covariance model(s) (required)
nx, sx, ox, # grid geometry (nx is required)
x=x, v=v, # data
probability=probability, # probability
cov_model_non_stationarity_list=cov_model_non_stationarity_list, # non-stationrities
method=method, # type of kriging
searchRadius=None, # search neighborhood ...
searchRadiusRelative=1.2,
nneighborMax=12,
nreal=nreal, # number of realizations
seed=seed, # seed
nproc=nproc, # computational resources ...
nthreads_per_proc=nthreads_per_proc,
verbose=2 # verbose mode
)
t2 = time.time() # end time
print('Elapsed time: {:.2g} sec'.format(t2-t1))
simul_img = geosclassic_output['image'] # output image
simulateIndicator: call `run_MPDSOMPGeosClassicIndicatorSim` [2 process(es) of 4 thread(s) (OpenMP)] ...
simulateIndicator: `run_MPDSOMPGeosClassicIndicatorSim` [2 process(es)] complete
Elapsed time: 3 sec
[29]:
# Total number of warning(s), and warning messages
geosclassic_output['nwarning'], geosclassic_output['warnings']
[29]:
(0, [])
[30]:
# %%script false --no-raise-error # skip this cell! (comment this line to run the cell)
# Equivalent, using other computational resources
# -----------------------------------------------
# Computational resources
nproc = 1
nthreads_per_proc = 1
t1 = time.time() # start time
geosclassic_output = gn.geosclassicinterface.simulateIndicator(
category_values, # list of categories (required)
cov_model, # covariance model(s) (required)
nx, sx, ox, # grid geometry (nx is required)
x=x, v=v, # data
probability=probability, # probability
cov_model_non_stationarity_list=cov_model_non_stationarity_list, # non-stationrities
method=method, # type of kriging
searchRadius=None, # search neighborhood ...
searchRadiusRelative=1.2,
nneighborMax=12,
nreal=nreal, # number of realizations
seed=seed, # seed
nproc=nproc, # computational resources ...
nthreads_per_proc=nthreads_per_proc,
verbose=2 # verbose mode
)
t2 = time.time() # end time
print('Elapsed time: {:.2g} sec'.format(t2-t1))
simul_img_2 = geosclassic_output['image'] # output image
print(f"Same results ? {np.allclose(simul_img.val, simul_img_2.val)}")
simulateIndicator: call `run_MPDSOMPGeosClassicIndicatorSim` [1 process of 1 thread(s) (OpenMP)] ...
simulateIndicator: `run_MPDSOMPGeosClassicIndicatorSim` [1 process] complete
Elapsed time: 14 sec
Same results ? True
Plot the results
[31]:
# Set sapcing (cell size) in y direction (1 cell in 1D) to visualize images using gn.imgplot.drawImage2D
sy = 0.2 * (simul_img.xmax() - simul_img.xmin())
simul_img.sy = sy
krig_img.sy = sy
if x is not None:
# Set y-coordinates for conditioning data points for visualization
y = len(x) * [simul_img.oy + 0.5*simul_img.sy]
[32]:
# Compute proportion of each category (pixel-wise)
simul_img_prop = gn.img.imageCategProp(simul_img, category_values)
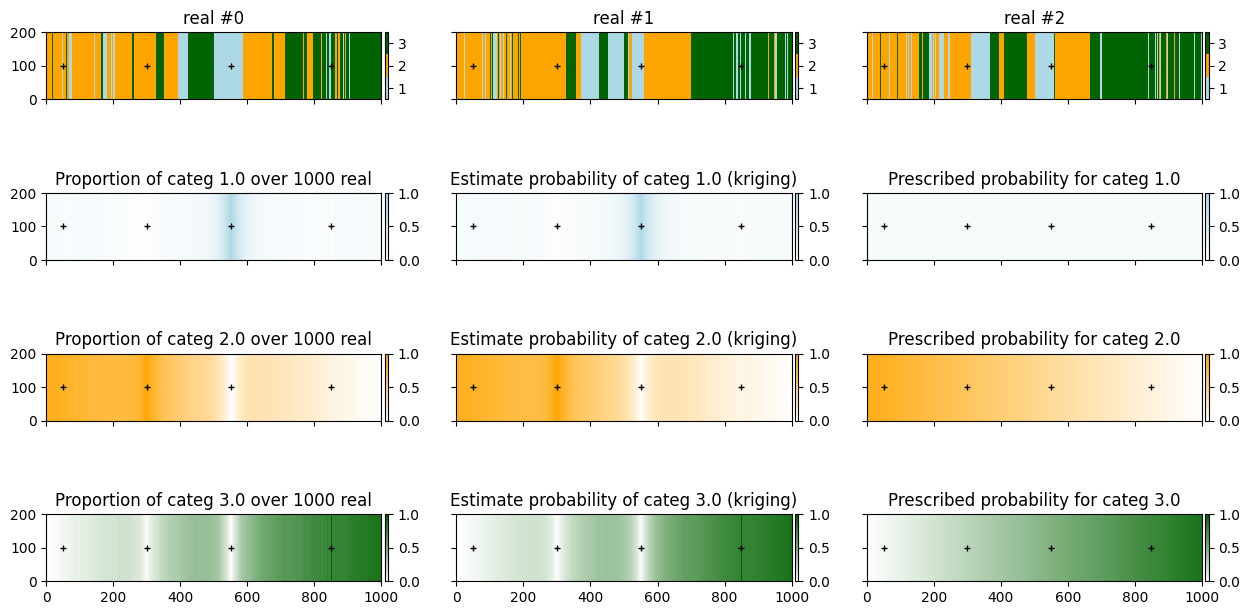
[33]:
# Plot
plt.subplots(1+ncategory, 3, figsize=(15, (1+ncategory)*2), sharex=True, sharey=True)
for i in range(3):
plt.subplot(1+ncategory, 3, i+1)
gn.imgplot.drawImage2D(simul_img, iv=i, categ=True, categVal=categVal, categCol=categCol)
if x is not None:
plt.plot(x, y, '+', c='black', markersize=5) # add conditioning point locations
plt.title(f'real #{i}')
for i in range(ncategory):
plt.subplot(1+ncategory, 3, 3*i+4)
gn.imgplot.drawImage2D(simul_img_prop, iv=i, vmin=0, vmax=1, cmap=cmap_categ[i])
if x is not None:
plt.plot(x, y, '+', c='black', markersize=5) # add conditioning point locations
plt.title(f'Proportion of categ {categVal[i]} over {nreal} real')
plt.subplot(1+ncategory, 3, 3*i+5)
gn.imgplot.drawImage2D(krig_img, iv=i, vmin=0, vmax=1, cmap=cmap_categ[i])
if x is not None:
plt.plot(x, y, '+', c='black', markersize=5) # add conditioning point locations
plt.title(f'Estimate probability of categ {categVal[i]} (kriging)')
plt.subplot(1+ncategory, 3, 3*i+6)
gn.imgplot.drawImage2D(probability_img, iv=i, vmin=0, vmax=1, cmap=cmap_categ[i])
if x is not None:
plt.plot(x, y, '+', c='black', markersize=5) # add conditioning point locations
plt.title(f'Prescribed probability for categ {categVal[i]}')
plt.show()
Check results
[34]:
# Check data
# ----------
if x is not None:
# Get index of conditioning location in the grid
data_grid_index = [gn.img.pointToGridIndex(xk, 0, 0, sx, 1., 1., ox, 0., 0.) for xk in x] # (ix, iy, iz) for each data point
# Check estimation
krig_v = [krig_img.val[:, iz, iy, ix] for ix, iy, iz in data_grid_index]
if ncategory == 1:
print(f'Estimation: all data respected ? {np.all(np.asarray(krig_v).reshape(-1) == np.asarray([1 if vi == category_values[0] else 0 for vi in v]))}')
else:
print(f'Estimation: all data respected ? {np.all([np.all(krig_v[i] == np.eye(ncategory)[np.where(np.asarray(category_values) == v[i])[0][0]]) for i in range(len(x))])}')
# Check simulation
sim_v = [simul_img.val[:, iz, iy, ix] for ix, iy, iz in data_grid_index]
print(f'Simulation: all data respected ? {np.all([np.all(sim_v[i] == v[i]) for i in range(len(x))])}')
Estimation: all data respected ? True
Simulation: all data respected ? True