GEONE - GEOSCLASSIC - categorical variable - Examples in 3D
Estimation (kriging) and simulation (Sequential Indicator Simulation, SIS)
See notebook ex_geosclassic_indicator_1d_1.ipynb for detail explanations about estimation (kriging) and simulation (Sequential Indicator Simulation, SIS) in a grid.
Examples in 3D
In this notebook, examples in 3D with a stationary covariance model are given.
Remark: for examples with non-stationary covariance models in 3D, see jupyter notebook ``ex_geosclassic_indicator_3d_2_non_stat_cov.ipynb``.
Import what is required
[1]:
import numpy as np
import matplotlib.pyplot as plt
import matplotlib.colors
import pyvista as pv
import time
# import package 'geone'
import geone as gn
[2]:
# Show version of python and version of geone
import sys
print(sys.version_info)
print('geone version: ' + gn.__version__)
sys.version_info(major=3, minor=13, micro=7, releaselevel='final', serial=0)
geone version: 1.3.1
[3]:
pv.set_jupyter_backend('static') # static plots
# pv.set_jupyter_backend('trame') # 3D-interactive plots
Remark
The matplotlib figures can be visualized in interactive mode:
%matplotlib notebook: enable interactive mode%matplotlib inline: disable interactive mode
Category values
A list of category values (facies) must be defined. Let ncategory be the length of this list, i.e. the number of categories:
if
ncategory == 1: the unique category value given must not be equal to 0; this is used for a binary case with values (“unique category value”, 0), where 0 indicates the absence of the considered medium; conditioning data values should be “unique category value” or 0if
ncategory >= 2: this is used for a multi-category case with given values (distinct); conditioning data values should be in the list of given values
Then, set color for each category, and color maps for proportions (for further plots).
Below: select the case with ``ncategory`` greater than one or equal to one below, comment the undesired cell.
[4]:
# Case with ncategory > 1
# -----------------------
category_values = [1., 2., 3.]
ncategory = len(category_values)
# Set colors ...
categVal = category_values
categCol = ['tab:blue', 'orange', 'darkgreen'] # must be of length len(categVal)
cmap_categ = [gn.customcolors.custom_cmap(['white', c]) for c in categCol]
categActive = [False, True, True]
[5]:
# # Case with ncategory = 1
# # -----------------------
# category_values = [2.] # all categories are 2. and 0.
# ncategory = len(category_values)
# # Set colors ...
# categVal = [category_values[0], 0]
# categCol = ['tab:red', 'lightblue'] # must be of length len(categVal)
# cmap_categ = [gn.customcolors.custom_cmap(['white', c]) for c in categCol]
# categActive = [True, False]
Grid (3D)
[6]:
nx, ny, nz = 85, 56, 34 # number of cells
sx, sy, sz = 1.0, 1.0, 1.0 # cell unit
ox, oy, oz = 0.0, 0.0, 0.0 # origin
dimension = (nx, ny, nz)
spacing = (sx, sy, sz)
origin = (ox, oy, oz)
Covariance model
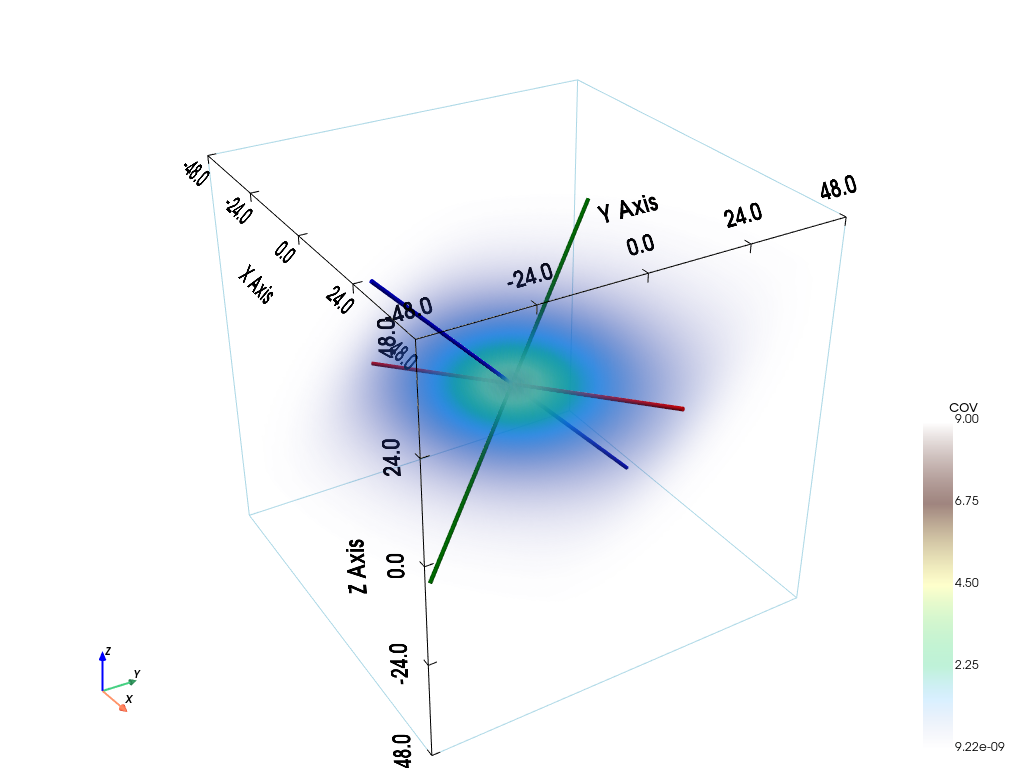
In 3D, a covariance model is given by an instance of the class geone.covModel.covModel3D (or geone.covModel.covModel1D for omni-directional (isotropic) case).
A covariance model is defined by its elementary contributions given as a list of 2-tuples, whose the first component is the type given by a string (nugget, spherical, exponential, gaussian, …) and the second component is a dictionary used to pass the required parameters (the weight (w), the range (r), …).
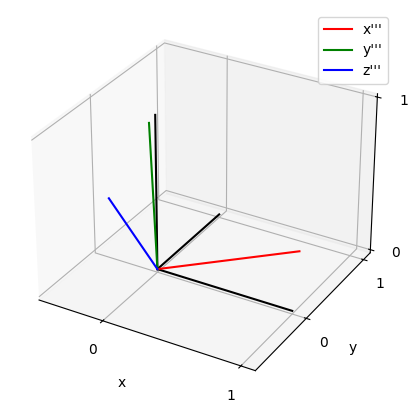
Azimuth (alpha), dip (beta) and plunge (gamma) angles can be specified in degrees: the coordinates system Ox’’’y’’’’z’’’, supporting the axes of the model (ranges), is obtained from the original coordinates system Oxyz as follows:
Oxyz -> rotation of angle -alpha around Oz -> Ox’y’z’
Ox’y’z’ -> rotation of angle -beta around Ox’ -> Ox’’y’’z’’
Ox’’y’’z’’ -> rotation of angle -gamma around Oy’’ -> Ox’’’y’’’z’’’
Note: see the notebook ``ex_general_multiGaussian.ipynb`` for available covariance models and examples.
[7]:
cov_model = gn.covModel.CovModel3D(elem=[
('exponential', {'w':9., 'r':[40, 20, 10]}), # elementary contribution
], alpha=-30, beta=-40, gamma=20, name='model-3D example')
[8]:
pp = pv.Plotter()
# pp = pv.Plotter(notebook=False) # open a plotter and specifying 'notebook=False'
cov_model.plot_model3d_volume(plotter=pp)
cpos = pp.show(cpos=(165, -100, 115), return_cpos=True)
[9]:
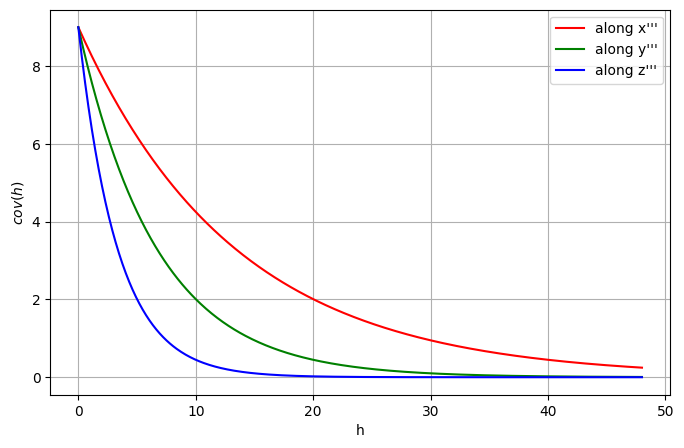
plt.figure(figsize=(8, 5))
cov_model.plot_model_curves()
plt.show()
[10]:
cov_model.plot_mrot(figsize=(5,5))
1. Example
Settings - using data (optional) and probability (constant, optional)
[11]:
if ncategory > 1:
# Case with ncategory > 1
# -----------------------
# Data
x = np.array([[ 10.25, 20.14, 3.15],
[ 40.50, 10.50, 10.50],
[ 30.65, 40.53, 20.24],
[ 30.18, 30.14, 30.98]]) # data locations (real coordinates)
v = [ 1., 2., 1., 3.] # data values
# x = None
# v = None
# Probability, proportion of each category
probability = [.1, .2, .7] # should sum to 1
# probability = None
# Type of kriging
method = 'simple_kriging'
else:
# Case with ncategory = 1
# -----------------------
# Data
x = np.array([[ 10.25, 20.14, 3.15],
[ 40.50, 10.50, 10.50],
[ 30.65, 40.53, 20.24],
[ 30.18, 30.14, 30.98]]) # data locations (real coordinates)
v = [ 0., 2., 2., 0.] # data values
# x = None
# v = None
# Probability, proportion (of non-zero category)
probability = [.7] # list of one number in the interval [0, 1]
# probability = None
# Type of kriging
method = 'simple_kriging'
Estimation of probabilities (by kriging)
[12]:
# Computational resources
nthreads = 8
t1 = time.time() # start time
geosclassic_output = gn.geosclassicinterface.estimateIndicator(
category_values, # list of categories (required)
cov_model, # covariance model(s) (required)
dimension, spacing, origin, # grid geometry (dimension is required)
x=x, v=v, # data
probability=probability, # probability
method=method, # type of kriging
use_unique_neighborhood=True, # search neighborhood ...
# searchRadius=None,
# searchRadiusRelative=1.2,
nneighborMax=12,
nthreads=nthreads, # computational resources
verbose=2 # verbose mode
)
t2 = time.time() # end time
print('Elapsed time: {:.2g} sec'.format(t2-t1))
krig_img = geosclassic_output['image'] # output image
estimateIndicator: call `run_MPDSOMPGeosClassicIndicatorSim` [1 process of 8 thread(s) (OpenMP)] ...
estimateIndicator: `run_MPDSOMPGeosClassicIndicatorSim` [1 process] complete
Elapsed time: 0.11 sec
[13]:
# Total number of warning(s), and warning messages
geosclassic_output['nwarning'], geosclassic_output['warnings']
[13]:
(0, [])
[14]:
%%script false --no-raise-error # skip this cell! (comment this line to run the cell)
# Equivalent, using other computational resources
# -----------------------------------------------
# Computational resources
nthreads = 1
t1 = time.time() # start time
geosclassic_output = gn.geosclassicinterface.estimateIndicator(
category_values, # list of categories (required)
cov_model, # covariance model(s) (required)
dimension, spacing, origin, # grid geometry (dimension is required)
x=x, v=v, # data
probability=probability, # probability
method=method, # type of kriging
use_unique_neighborhood=True, # search neighborhood ...
# searchRadius=None,
# searchRadiusRelative=1.2,
nneighborMax=12,
nthreads=nthreads, # computational resources
verbose=2 # verbose mode
)
t2 = time.time() # end time
print('Elapsed time: {:.2g} sec'.format(t2-t1))
krig_img_2 = geosclassic_output['image'] # output image
print(f"Same results ? {np.allclose(krig_img.val, krig_img_2.val)}")
Simulations
[15]:
# Number of realizations
nreal = 50
# Seed
seed = 321
# Computational resources
nproc = 2
nthreads_per_proc = 4
t1 = time.time() # start time
geosclassic_output = gn.geosclassicinterface.simulateIndicator(
category_values, # list of categories (required)
cov_model, # covariance model(s) (required)
dimension, spacing, origin, # grid geometry (dimension is required)
x=x, v=v, # data
probability=probability, # probability
method=method, # type of kriging
searchRadius=None, # search neighborhood ...
searchRadiusRelative=1.2,
nneighborMax=12,
nreal=nreal, # number of realizations
seed=seed, # seed
nproc=nproc, # computational resources ...
nthreads_per_proc=nthreads_per_proc,
verbose=2 # verbose mode
)
t2 = time.time() # end time
print('Elapsed time: {:.2g} sec'.format(t2-t1))
simul_img = geosclassic_output['image'] # output image
simulateIndicator: call `run_MPDSOMPGeosClassicIndicatorSim` [2 process(es) of 4 thread(s) (OpenMP)] ...
simulateIndicator: `run_MPDSOMPGeosClassicIndicatorSim` [2 process(es)] complete
Elapsed time: 26 sec
[16]:
# Total number of warning(s), and warning messages
geosclassic_output['nwarning'], geosclassic_output['warnings']
[16]:
(0, [])
[17]:
%%script false --no-raise-error # skip this cell! (comment this line to run the cell)
# Equivalent, using other computational resources
# -----------------------------------------------
# Computational resources
nproc = 1
nthreads_per_proc = 1
t1 = time.time() # start time
geosclassic_output = gn.geosclassicinterface.simulateIndicator(
category_values, # list of categories (required)
cov_model, # covariance model(s) (required)
dimension, spacing, origin, # grid geometry (dimension is required)
x=x, v=v, # data
probability=probability, # probability
method=method, # type of kriging
searchRadius=None, # search neighborhood ...
searchRadiusRelative=1.2,
nneighborMax=12,
nreal=nreal, # number of realizations
seed=seed, # seed
nproc=nproc, # computational resources ...
nthreads_per_proc=nthreads_per_proc,
verbose=2 # verbose mode
)
t2 = time.time() # end time
print('Elapsed time: {:.2g} sec'.format(t2-t1))
simul_img_2 = geosclassic_output['image'] # output image
print(f"Same results ? {np.allclose(simul_img.val, simul_img_2.val)}")
Plot the results
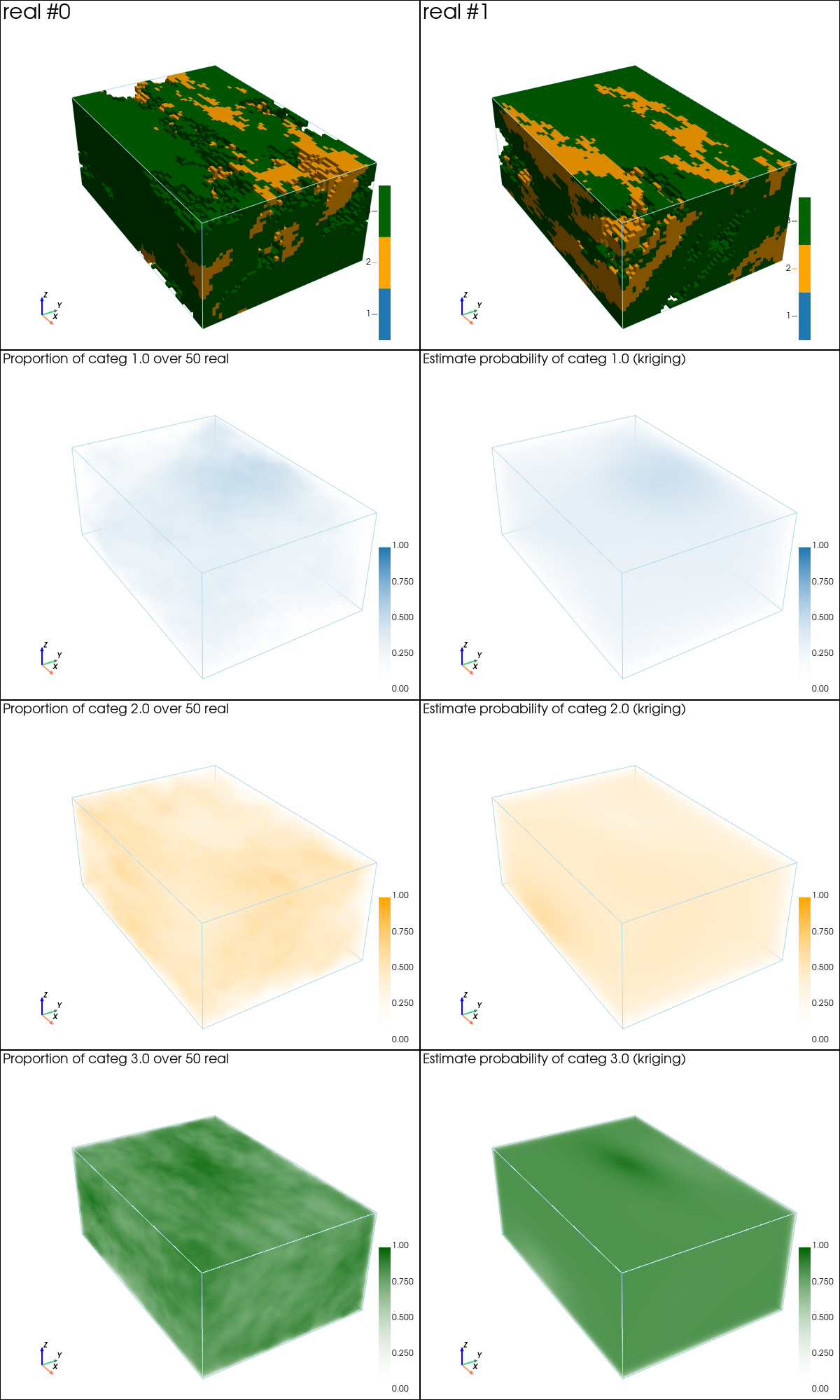
[18]:
# Compute proportion of each category (pixel-wise)
simul_img_prop = gn.img.imageCategProp(simul_img, category_values)
[19]:
# Plot "interactive in pop-up window" or "inline" (comment the undesired one) ...
# ... interactive (after closing the pop-up window, the position of the camera is retrieved in output)
#pp = pv.Plotter(shape=(1+ncategory, 2), window_size=(1200, 500*(1+ncategory)), notebook=False)
# ... inline
pp = pv.Plotter(shape=(1+ncategory, 2), window_size=(1200, 500*(1+ncategory)))
# 2 first reals
for i in (0, 1):
pp.subplot(0, i)
gn.imgplot3d.drawImage3D_surface(
simul_img, iv=i,
plotter=pp,
categ=True, categVal=categVal, categCol=categCol,
categActive=categActive,
text=f'real #{i}',
text_kwargs={'font_size':12},
scalar_bar_kwargs={'title':i*' ', 'vertical':True, 'label_font_size':12})
# note: scalar bar title : set new one for each plot to show the scalar bar...
# Proportion over realizations
for i in range(ncategory):
pp.subplot(i+1, 0)
gn.imgplot3d.drawImage3D_volume(
simul_img_prop, iv=i,
plotter=pp,
cmap=cmap_categ[i], cmin=0.0, cmax=1.0,
text=f'Proportion of categ {categVal[i]} over {nreal} real',
text_kwargs={'font_size':12},
scalar_bar_kwargs={'title':(i+2)*' ', 'vertical':True, 'label_font_size':12})
# Estimate by kriging
for i in range(ncategory):
pp.subplot(i+1, 1)
gn.imgplot3d.drawImage3D_volume(
krig_img, iv=i,
plotter=pp,
cmap=cmap_categ[i], cmin=0.0, cmax=1.0,
text=f'Estimate probability of categ {categVal[i]} (kriging)',
text_kwargs={'font_size':12},
scalar_bar_kwargs={'title':(i+2+ncategory)*' ', 'vertical':True, 'label_font_size':12})
pp.link_views()
cpos = pp.show(cpos=(165, -100, 115), return_cpos=True) # position of the camera can be specified
[20]:
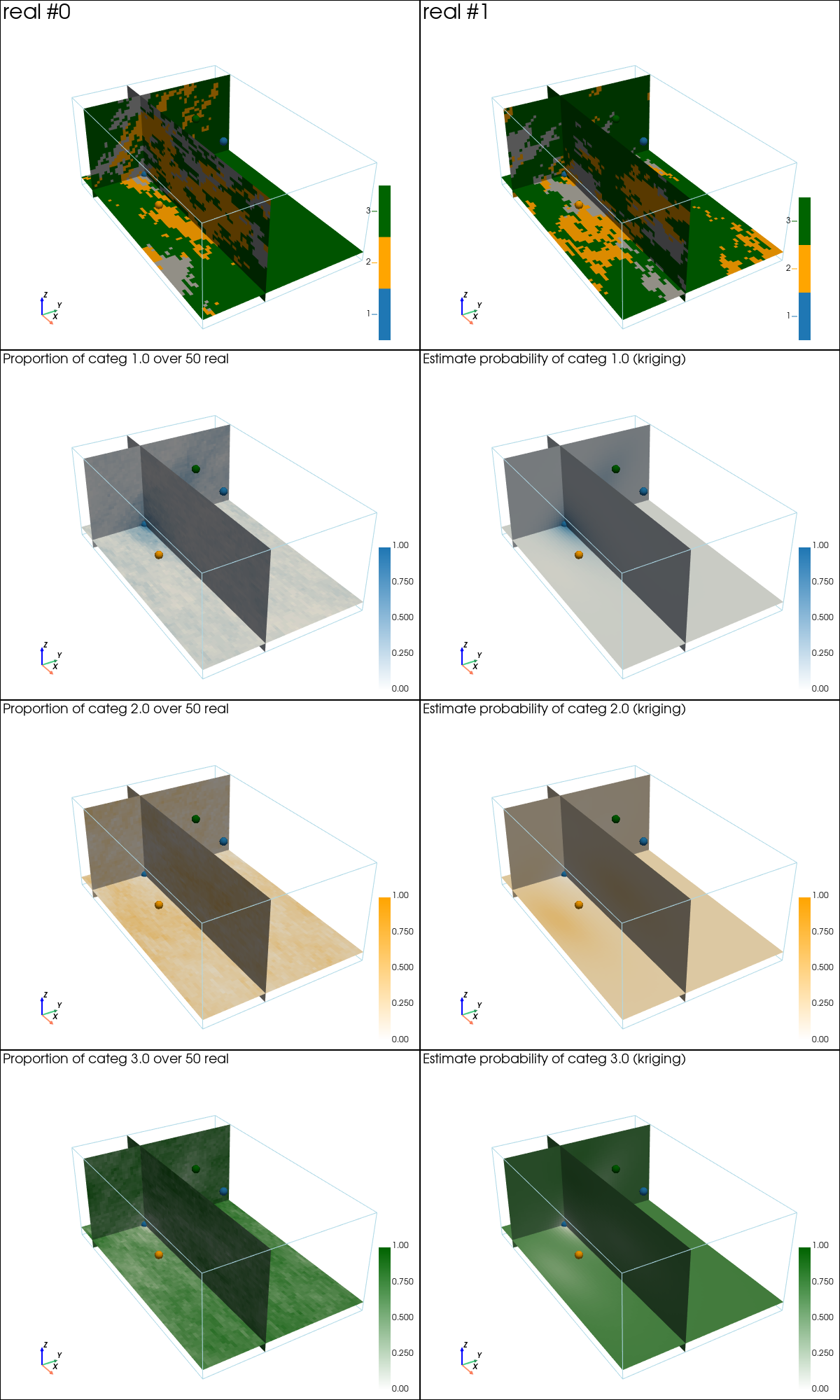
# Plot slices (with data points)
# ------------------------------
# Settings for plotting data
if x is not None:
# Get index of color in categVal for conditioning data
categVal_v = [np.where(vi == np.asarray(categVal))[0][0] for vi in v]
# Get colors for conditioning data according to their value and color settings
data_points_col = np.asarray([matplotlib.colors.to_rgba(categCol[categVal_vi]) for categVal_vi in categVal_v])
# data_points_mean_col = np.asarray([gn.imgplot.get_colors_from_values(1.0, cmap=cmap_categ[categVal_vi], cmin=0.0, cmax=1.0)[0] for categVal_vi in categVal_v])
data_points_mean_col = data_points_col
# Set points to be plotted
data_points = pv.PolyData(x)
data_points['colors'] = data_points_col
data_points_mean = pv.PolyData(x)
data_points_mean['colors'] = data_points_mean_col
# Set slices through data of index j
j = 0
slice_normal_x = x[j,0]
slice_normal_y = x[j,1]
slice_normal_z = x[j,2]
else:
# Set default slices
slice_normal_x = simul_img.x()[int(0.2*nx)]
slice_normal_y = simul_img.y()[int(0.2*ny)]
slice_normal_z = simul_img.z()[int(0.2*nz)]
# Plot "interactive in pop-up window" or "inline" (comment the undesired one) ...
# ... interactive (after closing the pop-up window, the position of the camera is retrieved in output)
#pp = pv.Plotter(shape=(1+ncategory, 2), window_size=(1200, 500*(1+ncategory)), notebook=False)
# ... inline
pp = pv.Plotter(shape=(1+ncategory, 2), window_size=(1200, 500*(1+ncategory)))
# 2 first reals
for i in (0, 1):
pp.subplot(0, i)
gn.imgplot3d.drawImage3D_slice(
simul_img, iv=i,
plotter=pp,
slice_normal_x=slice_normal_x,
slice_normal_y=slice_normal_y,
slice_normal_z=slice_normal_z,
categ=True, categVal=categVal, categCol=categCol,
categActive=categActive,
text=f'real #{i}',
text_kwargs={'font_size':12},
scalar_bar_kwargs={'title':i*' ', 'vertical':True, 'label_font_size':12})
# note: scalar bar title : set new one for each plot to show the scalar bar...
if x is not None:
pp.add_mesh(data_points, rgb=True, point_size=12., render_points_as_spheres=True) # add data points
# Proportion over realizations
for i in range(ncategory):
pp.subplot(i+1, 0)
gn.imgplot3d.drawImage3D_slice(
simul_img_prop, iv=i,
plotter=pp,
slice_normal_x=slice_normal_x,
slice_normal_y=slice_normal_y,
slice_normal_z=slice_normal_z,
cmap=cmap_categ[i], cmin=0.0, cmax=1.0,
text=f'Proportion of categ {categVal[i]} over {nreal} real',
text_kwargs={'font_size':12},
scalar_bar_kwargs={'title':(i+2)*' ', 'vertical':True, 'label_font_size':12})
if x is not None:
pp.add_mesh(data_points, rgb=True, point_size=12., render_points_as_spheres=True) # add data points
# Estimate by kriging
for i in range(ncategory):
pp.subplot(i+1, 1)
gn.imgplot3d.drawImage3D_slice(
krig_img, iv=i,
plotter=pp,
slice_normal_x=slice_normal_x,
slice_normal_y=slice_normal_y,
slice_normal_z=slice_normal_z,
cmap=cmap_categ[i], cmin=0.0, cmax=1.0,
text=f'Estimate probability of categ {categVal[i]} (kriging)',
text_kwargs={'font_size':12},
scalar_bar_kwargs={'title':(i+2+ncategory)*' ', 'vertical':True, 'label_font_size':12})
if x is not None:
pp.add_mesh(data_points, rgb=True, point_size=12., render_points_as_spheres=True) # add data points
pp.link_views()
cpos = pp.show(cpos=(165, -100, 115), return_cpos=True) # position of the camera can be specified
Check results
[21]:
# Check data
# ----------
if x is not None:
# Get index of conditioning location in the grid
data_grid_index = [gn.img.pointToGridIndex(xk[0], xk[1], xk[2], sx, sy, sz, ox, oy, oz) for xk in x] # (ix, iy, iz) for each data point
# Check estimation
krig_v = [krig_img.val[:, iz, iy, ix] for ix, iy, iz in data_grid_index]
if ncategory == 1:
print(f'Estimation: all data respected ? {np.all(np.asarray(krig_v).reshape(-1) == np.asarray([1 if vi == category_values[0] else 0 for vi in v]))}')
else:
print(f'Estimation: all data respected ? {np.all([np.all(krig_v[i] == np.eye(ncategory)[np.where(np.asarray(category_values) == v[i])[0][0]]) for i in range(len(x))])}')
# Check simulation
sim_v = [simul_img.val[:, iz, iy, ix] for ix, iy, iz in data_grid_index]
print(f'Simulation: all data respected ? {np.all([np.all(sim_v[i] == v[i]) for i in range(len(x))])}')
Estimation: all data respected ? True
Simulation: all data respected ? True
[22]:
# Compare probabilities
# ---------------------
if probability is not None:
print(f'Prescribed probabilities = {probability}')
print(f'Estimation: probabilities (mean over the grid) = {krig_img.val.mean(axis=(1,2,3))}')
print(f'Simulation: probabilities (mean over the grid and all real.)= {[np.mean(simul_img.val == cv) for cv in category_values]}')
Prescribed probabilities = [0.1, 0.2, 0.7]
Estimation: probabilities (mean over the grid) = [0.14194922 0.20944686 0.64860392]
Simulation: probabilities (mean over the grid and all real.)= [np.float64(0.13346280276816608), np.float64(0.23220415224913496), np.float64(0.6343330449826989)]
2. Example - using non-stationary probabilities
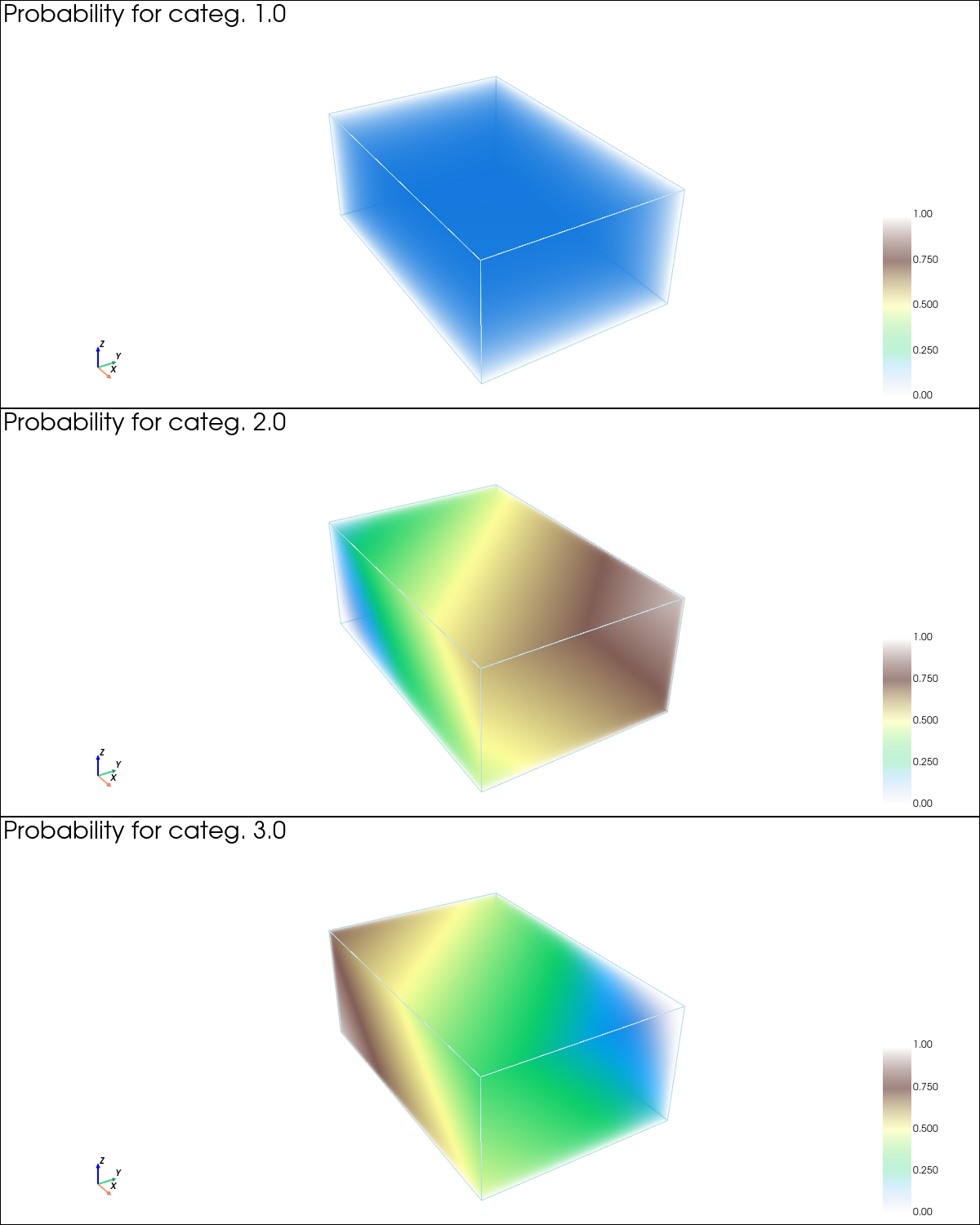
Setting probability (proportion) maps
[23]:
# Set an image with simulation grid geometry defined above, and no variable
im = gn.img.Img(nx, ny, nz, sx, sy, sz, ox, oy, oz, nv=0)
# Get the x, y, z coordinates of the centers of grid cell (meshgrid)
xx = im.xx()
yy = im.yy()
zz = im.zz()
if ncategory > 1:
# Case with ncategory > 1
# -----------------------
# Define probability maps for each category
c = 0.9
p1 = xx + yy + zz
p1 = c * (p1 - np.min(p1))/ (np.max(p1) - np.min(p1))
p2 = c - p1
p0 = (1. - c) * np.ones_like(p1) # 1.0 - p1 - p2 # constant map (0.1)
probability = np.array((p0, p1, p2))
else:
# Case with ncategory = 1
# -----------------------
c = 1.0
# Define probability map for non-zero category
p1 = xx + yy + zz
p1 = c * (p1 - np.min(p1))/ (np.max(p1) - np.min(p1))
probability = p1
[24]:
# Fill image for display
probability_img = gn.img.Img(nx, ny, nz, sx, sy, sz, ox, oy, oz, nv=ncategory, val=probability)
# Plot "interactive in pop-up window" or "inline" (comment the undesired one) ...
# ... interactive (after closing the pop-up window, the position of the camera is retrieved in output)
#pp = pv.Plotter(shape=(ncategory, 1), window_size=(1200, 500*(ncategory)), notebook=False)
# ... inline
pp = pv.Plotter(shape=(ncategory, 1), window_size=(1200, 500*(ncategory)))
for i in range(ncategory):
pp.subplot(i, 0)
gn.imgplot3d.drawImage3D_volume(
probability_img, iv=i,
plotter=pp,
cmap='terrain', cmin=0, cmax=1,
text=f'Probability for categ. {categVal[i]}',
text_kwargs={'font_size':12},
scalar_bar_kwargs={'title':i*' ', 'vertical':True, 'label_font_size':12})
# note: scalar bar title : set new one for each plot to show the scalar bar...
pp.link_views()
cpos = pp.show(cpos=(165, -100, 115), return_cpos=True) # position of the camera can be specified
Settings - using data (optional)
[25]:
if ncategory > 1:
# Case with ncategory > 1
# -----------------------
# Data
x = np.array([[ 10.25, 20.14, 3.15],
[ 40.50, 10.50, 10.50],
[ 30.65, 40.53, 20.24],
[ 30.18, 30.14, 30.98]]) # data locations (real coordinates)
v = [ 1., 2., 1., 3.] # data values
# x = None
# v = None
# Probability : `probability` defined above
# Type of kriging
method = 'simple_kriging'
else:
# Case with ncategory = 1
# -----------------------
# Data
x = np.array([[ 10.25, 20.14, 3.15],
[ 40.50, 10.50, 10.50],
[ 30.65, 40.53, 20.24],
[ 30.18, 30.14, 30.98]]) # data locations (real coordinates)
v = [ 0., 2., 2., 0.] # data values
# x = None
# v = None
# Probability : `probability` defined above
# Type of kriging
method = 'simple_kriging'
Estimation of probabilities (by kriging)
[26]:
# Computational resources
nthreads = 8
t1 = time.time() # start time
geosclassic_output = gn.geosclassicinterface.estimateIndicator(
category_values, # list of categories (required)
cov_model, # covariance model(s) (required)
dimension, spacing, origin, # grid geometry (dimension is required)
x=x, v=v, # data
probability=probability, # probability
method=method, # type of kriging
use_unique_neighborhood=True, # search neighborhood ...
# searchRadius=None,
# searchRadiusRelative=1.2,
nneighborMax=12,
nthreads=nthreads, # computational resources
verbose=2 # verbose mode
)
t2 = time.time() # end time
print('Elapsed time: {:.2g} sec'.format(t2-t1))
krig_img = geosclassic_output['image'] # output image
estimateIndicator: call `run_MPDSOMPGeosClassicIndicatorSim` [1 process of 8 thread(s) (OpenMP)] ...
estimateIndicator: `run_MPDSOMPGeosClassicIndicatorSim` [1 process] complete
Elapsed time: 0.15 sec
[27]:
# Total number of warning(s), and warning messages
geosclassic_output['nwarning'], geosclassic_output['warnings']
[27]:
(0, [])
[28]:
%%script false --no-raise-error # skip this cell! (comment this line to run the cell)
# Equivalent, using other computational resources
# -----------------------------------------------
# Computational resources
nthreads = 1
t1 = time.time() # start time
geosclassic_output = gn.geosclassicinterface.estimateIndicator(
category_values, # list of categories (required)
cov_model, # covariance model(s) (required)
dimension, spacing, origin, # grid geometry (dimension is required)
x=x, v=v, # data
probability=probability, # probability
method=method, # type of kriging
use_unique_neighborhood=True, # search neighborhood ...
# searchRadius=None,
# searchRadiusRelative=1.2,
nneighborMax=12,
nthreads=nthreads, # computational resources
verbose=2 # verbose mode
)
t2 = time.time() # end time
print('Elapsed time: {:.2g} sec'.format(t2-t1))
krig_img_2 = geosclassic_output['image'] # output image
print(f"Same results ? {np.allclose(krig_img.val, krig_img_2.val)}")
Simulations
[29]:
# Number of realizations
nreal = 50
# Seed
seed = 321
# Computational resources
nproc = 2
nthreads_per_proc = 4
t1 = time.time() # start time
geosclassic_output = gn.geosclassicinterface.simulateIndicator(
category_values, # list of categories (required)
cov_model, # covariance model(s) (required)
dimension, spacing, origin, # grid geometry (dimension is required)
x=x, v=v, # data
probability=probability, # probability
method=method, # type of kriging
searchRadius=None, # search neighborhood ...
searchRadiusRelative=1.2,
nneighborMax=12,
nreal=nreal, # number of realizations
seed=seed, # seed
nproc=nproc, # computational resources ...
nthreads_per_proc=nthreads_per_proc,
verbose=2 # verbose mode
)
t2 = time.time() # end time
print('Elapsed time: {:.2g} sec'.format(t2-t1))
simul_img = geosclassic_output['image'] # output image
simulateIndicator: call `run_MPDSOMPGeosClassicIndicatorSim` [2 process(es) of 4 thread(s) (OpenMP)] ...
simulateIndicator: `run_MPDSOMPGeosClassicIndicatorSim` [2 process(es)] complete
Elapsed time: 28 sec
[30]:
# Total number of warning(s), and warning messages
geosclassic_output['nwarning'], geosclassic_output['warnings']
[30]:
(0, [])
[31]:
%%script false --no-raise-error # skip this cell! (comment this line to run the cell)
# Equivalent, using other computational resources
# -----------------------------------------------
# Computational resources
nproc = 1
nthreads_per_proc = 1
t1 = time.time() # start time
geosclassic_output = gn.geosclassicinterface.simulateIndicator(
category_values, # list of categories (required)
cov_model, # covariance model(s) (required)
dimension, spacing, origin, # grid geometry (dimension is required)
x=x, v=v, # data
probability=probability, # probability
method=method, # type of kriging
searchRadius=None, # search neighborhood ...
searchRadiusRelative=1.2,
nneighborMax=12,
nreal=nreal, # number of realizations
seed=seed, # seed
nproc=nproc, # computational resources ...
nthreads_per_proc=nthreads_per_proc,
verbose=2 # verbose mode
)
t2 = time.time() # end time
print('Elapsed time: {:.2g} sec'.format(t2-t1))
simul_img_2 = geosclassic_output['image'] # output image
print(f"Same results ? {np.allclose(simul_img.val, simul_img_2.val)}")
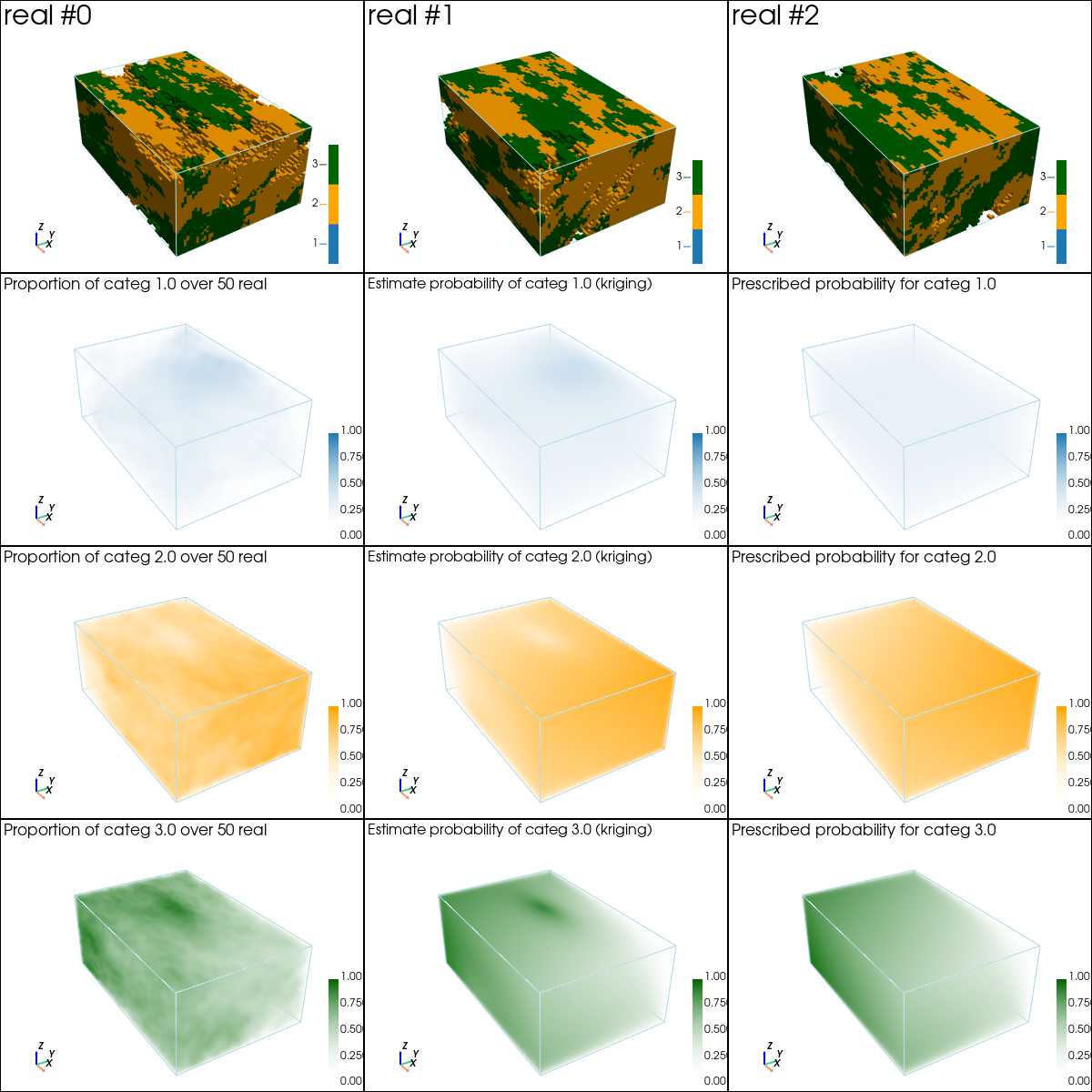
Plot the results
[32]:
# Compute proportion of each category (pixel-wise)
simul_img_prop = gn.img.imageCategProp(simul_img, category_values)
[33]:
# Plot "interactive in pop-up window" or "inline" (comment the undesired one) ...
# ... interactive (after closing the pop-up window, the position of the camera is retrieved in output)
#pp = pv.Plotter(shape=(1+ncategory, 2), window_size=(1200, 300*(1+ncategory)), notebook=False)
# ... inline
pp = pv.Plotter(shape=(1+ncategory, 3), window_size=(1200, 300*(1+ncategory)))
# 3 first reals
for i in (0, 1, 2):
pp.subplot(0, i)
gn.imgplot3d.drawImage3D_surface(
simul_img, iv=i,
plotter=pp,
categ=True, categVal=categVal, categCol=categCol,
categActive=categActive,
text=f'real #{i}',
text_kwargs={'font_size':12},
scalar_bar_kwargs={'title':i*' ', 'vertical':True, 'label_font_size':12})
# note: scalar bar title : set new one for each plot to show the scalar bar...
# Proportion over realizations
for i in range(ncategory):
pp.subplot(i+1, 0)
gn.imgplot3d.drawImage3D_volume(
simul_img_prop, iv=i,
plotter=pp,
cmap=cmap_categ[i], cmin=0.0, cmax=1.0,
text=f'Proportion of categ {categVal[i]} over {nreal} real',
text_kwargs={'font_size':12},
scalar_bar_kwargs={'title':(i+3)*' ', 'vertical':True, 'label_font_size':12})
# Estimate by kriging
for i in range(ncategory):
pp.subplot(i+1, 1)
gn.imgplot3d.drawImage3D_volume(
krig_img, iv=i,
plotter=pp,
cmap=cmap_categ[i], cmin=0.0, cmax=1.0,
text=f'Estimate probability of categ {categVal[i]} (kriging)',
text_kwargs={'font_size':12},
scalar_bar_kwargs={'title':(i+3+ncategory)*' ', 'vertical':True, 'label_font_size':12})
# Prescibed probability
for i in range(ncategory):
pp.subplot(i+1, 2)
gn.imgplot3d.drawImage3D_volume(
probability_img, iv=i,
plotter=pp,
cmap=cmap_categ[i], cmin=0.0, cmax=1.0,
text=f'Prescribed probability for categ {categVal[i]}',
text_kwargs={'font_size':12},
scalar_bar_kwargs={'title':(i+3+2*ncategory)*' ', 'vertical':True, 'label_font_size':12})
pp.link_views()
cpos = pp.show(cpos=(165, -100, 115), return_cpos=True) # position of the camera can be specified
[34]:
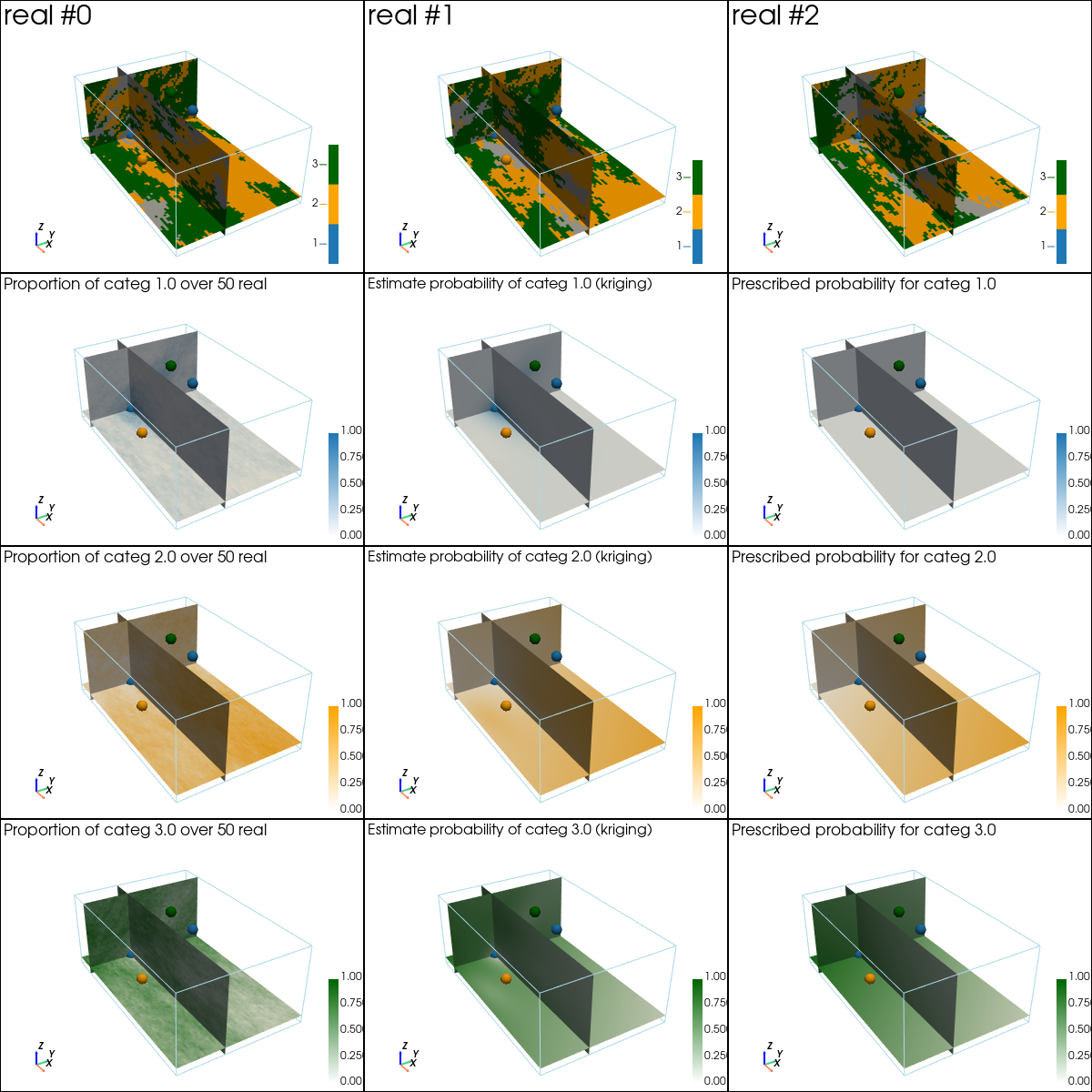
# Plot slices (with data points)
# ------------------------------
# Settings for plotting data
if x is not None:
# Get index of color in categVal for conditioning data
categVal_v = [np.where(vi == np.asarray(categVal))[0][0] for vi in v]
# Get colors for conditioning data according to their value and color settings
data_points_col = np.asarray([matplotlib.colors.to_rgba(categCol[categVal_vi]) for categVal_vi in categVal_v])
# data_points_mean_col = np.asarray([gn.imgplot.get_colors_from_values(1.0, cmap=cmap_categ[categVal_vi], cmin=0.0, cmax=1.0)[0] for categVal_vi in categVal_v])
data_points_mean_col = data_points_col
# Set points to be plotted
data_points = pv.PolyData(x)
data_points['colors'] = data_points_col
data_points_mean = pv.PolyData(x)
data_points_mean['colors'] = data_points_mean_col
# Set slices through data of index j
j = 0
slice_normal_x = x[j,0]
slice_normal_y = x[j,1]
slice_normal_z = x[j,2]
else:
# Set default slices
slice_normal_x = simul_img.x()[int(0.2*nx)]
slice_normal_y = simul_img.y()[int(0.2*ny)]
slice_normal_z = simul_img.z()[int(0.2*nz)]
# Plot "interactive in pop-up window" or "inline" (comment the undesired one) ...
# ... interactive (after closing the pop-up window, the position of the camera is retrieved in output)
#pp = pv.Plotter(shape=(1+ncategory, 2), window_size=(1200, 300*(1+ncategory)), notebook=False)
# ... inline
pp = pv.Plotter(shape=(1+ncategory, 3), window_size=(1200, 300*(1+ncategory)))
# 3 first reals
for i in (0, 1, 2):
pp.subplot(0, i)
gn.imgplot3d.drawImage3D_slice(
simul_img, iv=i,
plotter=pp,
slice_normal_x=slice_normal_x,
slice_normal_y=slice_normal_y,
slice_normal_z=slice_normal_z,
categ=True, categVal=categVal, categCol=categCol,
categActive=categActive,
text=f'real #{i}',
text_kwargs={'font_size':12},
scalar_bar_kwargs={'title':i*' ', 'vertical':True, 'label_font_size':12})
# note: scalar bar title : set new one for each plot to show the scalar bar...
if x is not None:
pp.add_mesh(data_points, rgb=True, point_size=12., render_points_as_spheres=True) # add data points
# Proportion over realizations
for i in range(ncategory):
pp.subplot(i+1, 0)
gn.imgplot3d.drawImage3D_slice(
simul_img_prop, iv=i,
plotter=pp,
slice_normal_x=slice_normal_x,
slice_normal_y=slice_normal_y,
slice_normal_z=slice_normal_z,
cmap=cmap_categ[i], cmin=0.0, cmax=1.0,
text=f'Proportion of categ {categVal[i]} over {nreal} real',
text_kwargs={'font_size':12},
scalar_bar_kwargs={'title':(i+3)*' ', 'vertical':True, 'label_font_size':12})
if x is not None:
pp.add_mesh(data_points, rgb=True, point_size=12., render_points_as_spheres=True) # add data points
# Estimate by kriging
for i in range(ncategory):
pp.subplot(i+1, 1)
gn.imgplot3d.drawImage3D_slice(
krig_img, iv=i,
plotter=pp,
slice_normal_x=slice_normal_x,
slice_normal_y=slice_normal_y,
slice_normal_z=slice_normal_z,
cmap=cmap_categ[i], cmin=0.0, cmax=1.0,
text=f'Estimate probability of categ {categVal[i]} (kriging)',
text_kwargs={'font_size':12},
scalar_bar_kwargs={'title':(i+3+ncategory)*' ', 'vertical':True, 'label_font_size':12})
if x is not None:
pp.add_mesh(data_points, rgb=True, point_size=12., render_points_as_spheres=True) # add data points
# Prescibed probability
for i in range(ncategory):
pp.subplot(i+1, 2)
gn.imgplot3d.drawImage3D_slice(
probability_img, iv=i,
plotter=pp,
slice_normal_x=slice_normal_x,
slice_normal_y=slice_normal_y,
slice_normal_z=slice_normal_z,
cmap=cmap_categ[i], cmin=0.0, cmax=1.0,
text=f'Prescribed probability for categ {categVal[i]}',
text_kwargs={'font_size':12},
scalar_bar_kwargs={'title':(i+3+2*ncategory)*' ', 'vertical':True, 'label_font_size':12})
if x is not None:
pp.add_mesh(data_points, rgb=True, point_size=12., render_points_as_spheres=True) # add data points
pp.link_views()
cpos = pp.show(cpos=(165, -100, 115), return_cpos=True) # position of the camera can be specified
Check results
[35]:
# Check data
# ----------
if x is not None:
# Get index of conditioning location in the grid
data_grid_index = [gn.img.pointToGridIndex(xk[0], xk[1], xk[2], sx, sy, sz, ox, oy, oz) for xk in x] # (ix, iy, iz) for each data point
# Check estimation
krig_v = [krig_img.val[:, iz, iy, ix] for ix, iy, iz in data_grid_index]
if ncategory == 1:
print(f'Estimation: all data respected ? {np.all(np.asarray(krig_v).reshape(-1) == np.asarray([1 if vi == category_values[0] else 0 for vi in v]))}')
else:
print(f'Estimation: all data respected ? {np.all([np.all(krig_v[i] == np.eye(ncategory)[np.where(np.asarray(category_values) == v[i])[0][0]]) for i in range(len(x))])}')
# Check simulation
sim_v = [simul_img.val[:, iz, iy, ix] for ix, iy, iz in data_grid_index]
print(f'Simulation: all data respected ? {np.all([np.all(sim_v[i] == v[i]) for i in range(len(x))])}')
Estimation: all data respected ? True
Simulation: all data respected ? True